


来源 | 雷达信号处理matlab
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
声明 | 本号聚焦相关知识分享,内容观点不代表本号立场,可追溯内容均注明来源,若存在版权等问题,请联系(15881101905,微信同号)删除,谢谢。
SAR 成像原理
SAR 是一种主动微波对地观测设备,采用相干的雷达系统和单个移动的天线来模拟真实线性天线阵中所有的天线功能。单个天线依次占据合成阵列空间的位置,将各个位置接收的信号的幅度和相位存储起来,再经过处理,从而呈现出被雷达所照射区域的地物反射特性图像。
图源自网络
SAR 可以看成一个输入输出系统,SAR 系统输入的是目标场景的散射分布,输出的是回波数据,根据具体的 SAR 信号模型和成像算法的实现可以获得该 SAR 系统的系统响应函数。这样 SAR 成像问题可认为是已知系统的输出和系统的响应函数来求解系统输入的求逆问题。
以条带式正侧视 SAR 为例,为了实现合成阵列的任务,雷达沿直线航线飞行,并发射和接收周期的宽频带脉冲信号。下图为雷达收集信号的几何平面模型图。
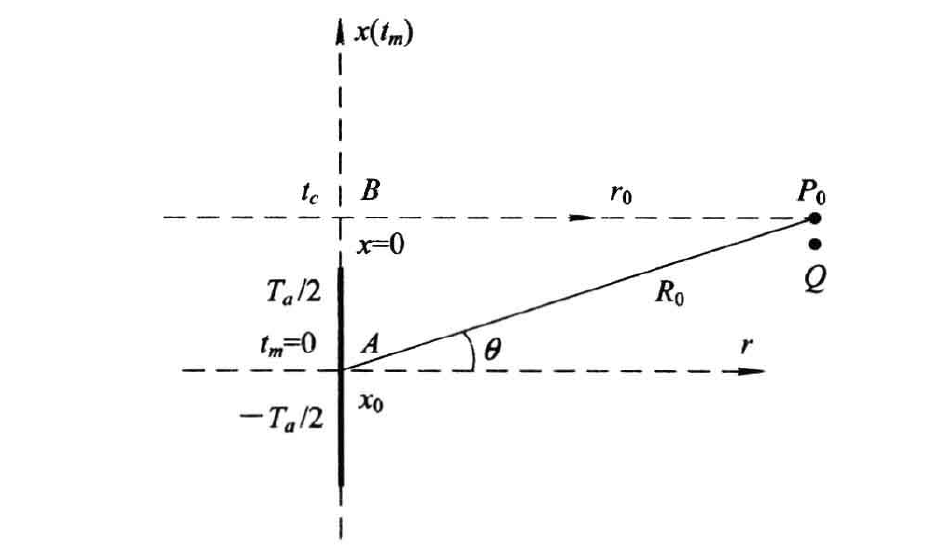
时间用
载机沿
雷达以快时间
由上面的分析可知,合成孔径雷达在实际的三维空间里所录取的二维数据用圆柱坐标来描述是合适的,即在航向轴的法平面里只有距离数据而没有方向数据。
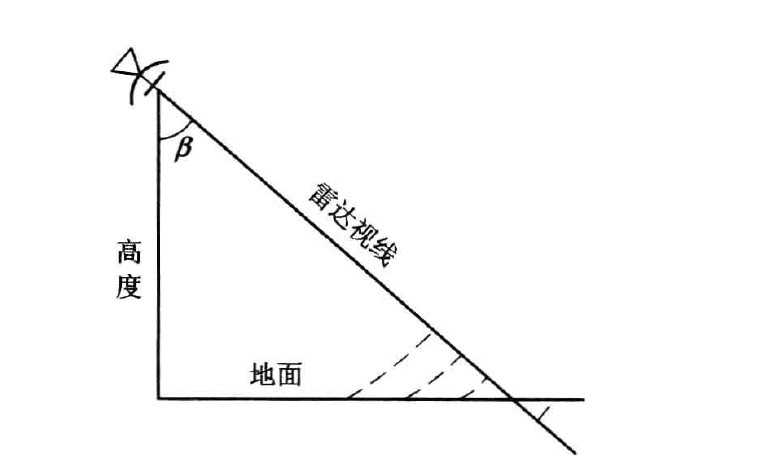
不过法平面里的方向范围还是有限制的,只有雷达高低角波束所覆盖到的区域才能被观测到,而实际雷达高低角的波束宽度是不大的,通常只有几度。
为了形象地描述录取的二维数据,可将该法平面的径向轴选择在雷达波束范围里,以雷达到场景中心点的连线作为法平面的径向轴,联同航线轴构成数据录取平面(如下图所示)。
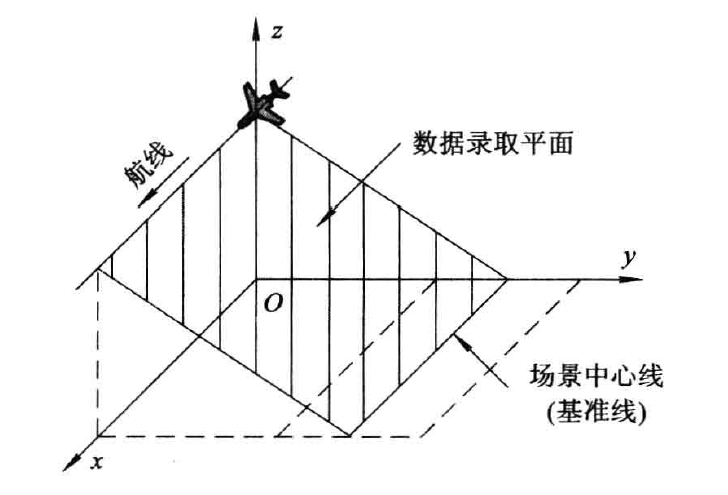
而场景中心线以外的场景目标不在数据录取平面里,实际录取的也只是这些目标到雷达的距离,故可认为它们是通过以雷达为中心的圆弧线投影到上述数据录取平面上,如下图所示。
SAR 成像实质上是从回波信号中提取观测带地表各散射单元的雷达后向散射系数,并按照它们各自的距离一方位位置显示。
如果用
数据录取,即在载机飞行过程中,将雷达收到的基频回波数据记录下来
脉冲压缩,由于匹配函数在距离维是空变的,要特别加以注意
二维场景成像
以上是在理想工作条件下的几个主要步骤。如果考虑到载机飞行中不可避免的颠簸和起伏,在匹配滤波前还要对数据进行运动补偿;在某些情况下所成的图像存在几何形变,在成像最后还要进行几何形变校正。
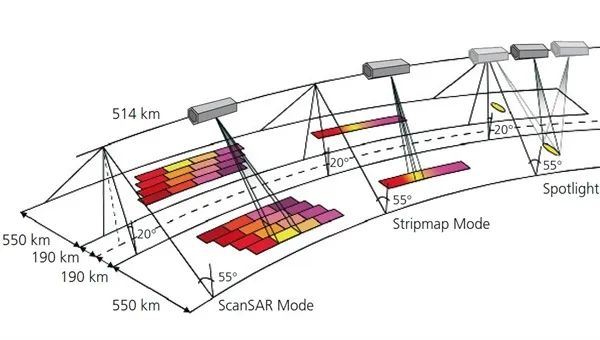
成像模式
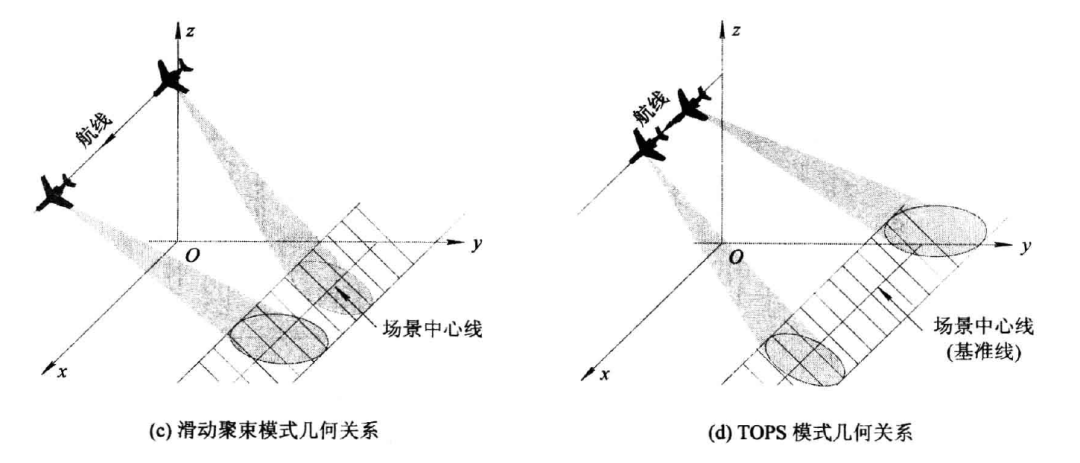
随着 SAR 成像需求的发展,SAR 已发展了多种工作模式。这里从 SAR 工作波束指向变化的角度将 SAR 成像的工作模式分为条带式(Stripmap)、聚束式(Spotlight)、滑动聚束式(Sliding Spotlight)、TOPS式和扫描式(Scan)五种类型。
它们的工作几何关系分别如下图所示。
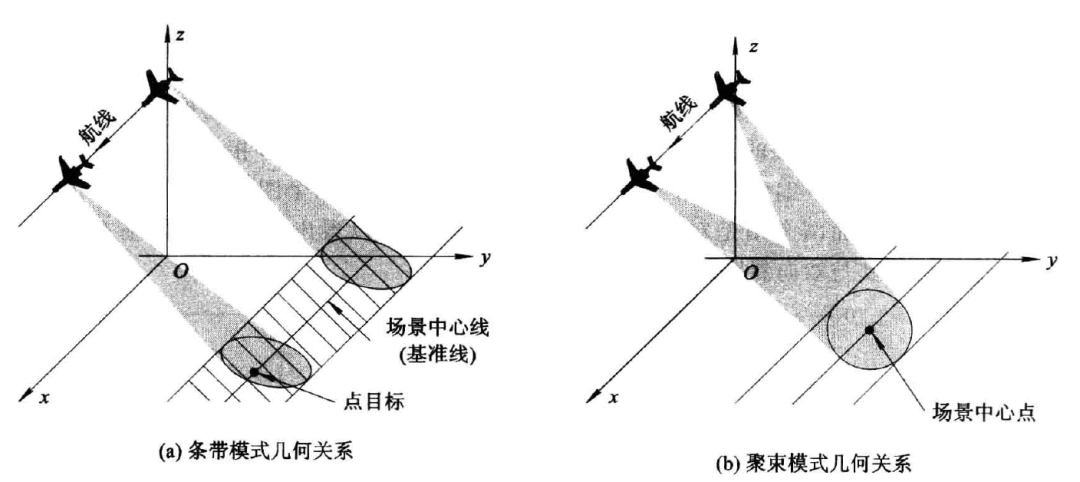
条带模式最为简单,雷达运动过程中波束指向没有发生变化;聚束模式是波束始终指向一个固定场景中的点;
滑动聚束和 TOPS 是雷达运动过程中天线波束指向随慢时间沿方位变化,它们的波束指向都绕着一个虚拟的中心旋转,只不过滑动聚束的旋转中心较参考中心线更远一些,而 TOPS 的旋转中心在场景中心偏向航线的一侧;
Scan 模式是雷达波束在短时间内照射一个测绘带,下一个时间照射另一个测绘带。
从对单个点的合成孔径长短考虑,可以得出结论:对于同等条件下,聚束模式的分辨率最高,其次是滑动聚束,再者是条带模式,最后是 TOPS 和 Scan 模式。但是它们对场景的覆盖能力的顺序与分辨率高低顺序相反,因此这几种模式都是测绘带和分辨率折中的结果。
- The End -
版权声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系删除。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!
