


来源 | 战术导弹技术
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
声明 | 本号聚焦相关知识分享,内容观点不代表本号立场,可追溯内容均注明来源,若存在版权等问题,请联系(15881101905,微信同号)删除,谢谢。
徐文钰敖海跃刘燕斌
(南京航空航天大学航天学院,南京 211106)
 摘 要为解决多无人机协同任务环境下需要面对的航迹重规划问题,针对传统避障方法以及现有常规智能避障算法的局限性,提出融合鸽群优化算法与人工势场法的局部航迹规划方法。该算法克服人工势场法规划的航迹容易陷入局部最优陷阱和使用常规智能避障算法会使时间成本增加的问题,利用鸽群优化算法寻找最优预测距离,可在突发威胁环境下为多无人机规划避开威胁区到达目标点的可行航迹。仿真实验结果表明,该算法能在满足约束的条件下,实现多无人机在面对突发威胁时航迹的动态调整,且时间成本较小。 关键词航迹规划;局部路径规划;鸽群优化算法;人工势场法
摘 要为解决多无人机协同任务环境下需要面对的航迹重规划问题,针对传统避障方法以及现有常规智能避障算法的局限性,提出融合鸽群优化算法与人工势场法的局部航迹规划方法。该算法克服人工势场法规划的航迹容易陷入局部最优陷阱和使用常规智能避障算法会使时间成本增加的问题,利用鸽群优化算法寻找最优预测距离,可在突发威胁环境下为多无人机规划避开威胁区到达目标点的可行航迹。仿真实验结果表明,该算法能在满足约束的条件下,实现多无人机在面对突发威胁时航迹的动态调整,且时间成本较小。 关键词航迹规划;局部路径规划;鸽群优化算法;人工势场法
 为无人机自带传感器的最大探测半径。
为无人机自带传感器的最大探测半径。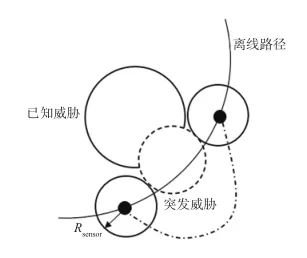
 | (1) |
 为第
为第 段飞行航迹的距离,有:
段飞行航迹的距离,有: | (2) |
 为无人机个数,为第个航路点,
为无人机个数,为第个航路点, 、
、 分别表示第
分别表示第 架无人机的两个相邻航路点的坐标。
架无人机的两个相邻航路点的坐标。 | (3) |
 为第架无人机的第个航路点处的转向角。
为第架无人机的第个航路点处的转向角。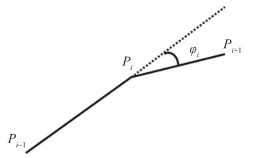
 ,此约束的数学模型如式(4)所示:
,此约束的数学模型如式(4)所示: | (4) |
表示第段航迹的长度, 表示航迹段数量。
表示航迹段数量。 ,则航迹中任意直线航迹的距离满足如式(5)所示的条件:
,则航迹中任意直线航迹的距离满足如式(5)所示的条件: | (5) |
只鸽子的位置 、速度
、速度 采用如式(6)和(7)表示:
采用如式(6)和(7)表示: | (6) |
 | (7) |
只鸽子在第 次迭代中其位置为
次迭代中其位置为 ,速度为
,速度为 ,最优鸽子的位置为
,最优鸽子的位置为 ,速度为
,速度为 。
。 | (8) |
 | (9) |
 为地图罗盘算子,
为地图罗盘算子, 为[0,1]间的随机数。只鸽子在第次迭代中的位置为,鸽群中心位置为
为[0,1]间的随机数。只鸽子在第次迭代中的位置为,鸽群中心位置为 。
。 | (10) |
 | (11) |
 | (12) |
 为第次迭代后鸽子数量,
为第次迭代后鸽子数量, 为适应度函数。
为适应度函数。 | (13) |
 为引力场,
为引力场, 为斥力场。引力和斥力被定义为引力场和斥力场的负梯度,可知无人机在人工势场中所受的合力为:
为斥力场。引力和斥力被定义为引力场和斥力场的负梯度,可知无人机在人工势场中所受的合力为: | (14) |
 为目标点对无人机产生的引力,
为目标点对无人机产生的引力, 为威胁对无人机产生的斥力,无人机所受合力如图4所示。
为威胁对无人机产生的斥力,无人机所受合力如图4所示。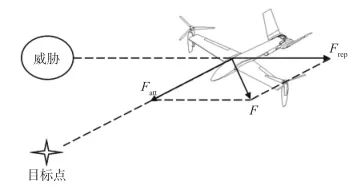
 ,目标点坐标为
,目标点坐标为 ,引力场函数和斥力场函数计算公式为:
,引力场函数和斥力场函数计算公式为: | (15) |
 | (16) |
为目标点对无人机的引力场,为威胁对无人机的斥力场, 为引力增益系数,
为引力增益系数, 为斥力增益系数,为无人机在空间位置与威胁的最短距离,
为斥力增益系数,为无人机在空间位置与威胁的最短距离, 为单个威胁影响的最大距离范围,只有在无人机与威胁的距离小于时,威胁才对无人机产生影响。引力和斥力分别为引力场函数和斥力场函数的负梯度:
为单个威胁影响的最大距离范围,只有在无人机与威胁的距离小于时,威胁才对无人机产生影响。引力和斥力分别为引力场函数和斥力场函数的负梯度: | (17) |
 | (18) |
 ,首先找出距离当前位置与目标点连线所在直线最近的威胁区,将其作为中心威胁区,并计算无人机当前位置到中心威胁区的距离
,首先找出距离当前位置与目标点连线所在直线最近的威胁区,将其作为中心威胁区,并计算无人机当前位置到中心威胁区的距离 。然后判断和的大小,如果
。然后判断和的大小,如果 ,则无人机按照传统人工势场法向目标点移动;如果
,则无人机按照传统人工势场法向目标点移动;如果 ,则将飞行方向所在直线朝威胁区个数较少的方向每次旋转一个较小的角度,并且判断所有威胁区到旋转后的直线的距离是否大于安全距离
,则将飞行方向所在直线朝威胁区个数较少的方向每次旋转一个较小的角度,并且判断所有威胁区到旋转后的直线的距离是否大于安全距离 ,如果大于,则停止旋转,以当前位置为端点,以当前直线为方向,以为半径,作一线段,线段的另一端点就是虚拟目标点的位置。之后沿当前直线继续前进,直到达到虚拟目标点,跳出局部最优陷阱。的选择决定着虚拟目标点法的成败及所规划出航迹的性能。预测距离选择过小,会使得无人机先进入凹形威胁区内,然后再逃出,这会使得规划出的航迹不够平滑,导致机动代价增大,甚至存在规划失败的可能;预测距离选择过大,则会使得无人机过早使用虚拟目标点法进行规划,这会导致航迹距离代价过大。图5为带预测距离的虚拟目标点法的示意图。
,如果大于,则停止旋转,以当前位置为端点,以当前直线为方向,以为半径,作一线段,线段的另一端点就是虚拟目标点的位置。之后沿当前直线继续前进,直到达到虚拟目标点,跳出局部最优陷阱。的选择决定着虚拟目标点法的成败及所规划出航迹的性能。预测距离选择过小,会使得无人机先进入凹形威胁区内,然后再逃出,这会使得规划出的航迹不够平滑,导致机动代价增大,甚至存在规划失败的可能;预测距离选择过大,则会使得无人机过早使用虚拟目标点法进行规划,这会导致航迹距离代价过大。图5为带预测距离的虚拟目标点法的示意图。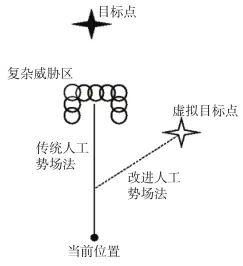
 进行优化时适应度值的计算方法如下:
进行优化时适应度值的计算方法如下: | (19) |
 | (20) |
 | (21) |
 | (22) |
 为当前点的坐标,
为当前点的坐标, 为威胁区的圆心坐标,
为威胁区的圆心坐标, 为虚拟目标点法产生的路径长度代价,
为虚拟目标点法产生的路径长度代价, 为从当前点指向威胁区的向量,
为从当前点指向威胁区的向量, 为从当前点指向虚拟目标点的向量,
为从当前点指向虚拟目标点的向量, 为虚拟目标点法产生的转向角代价,
为虚拟目标点法产生的转向角代价, 为权重系数,
为权重系数, 为虚拟目标点法产生的总代价。
为虚拟目标点法产生的总代价。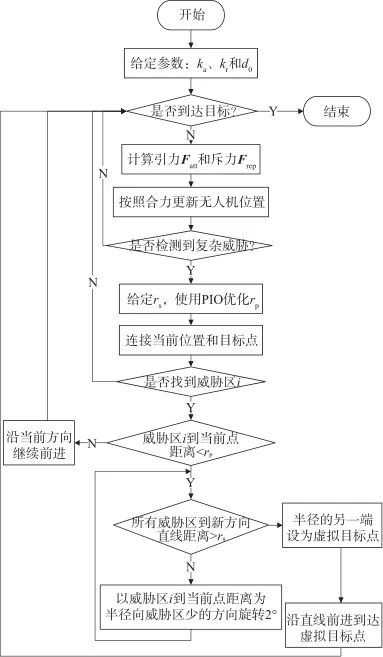
 、斥力增益系数
、斥力增益系数 和单个威胁影响的最大距离范围
和单个威胁影响的最大距离范围 ;和斥力,并向合力方向前进一个步长;
;和斥力,并向合力方向前进一个步长; ,初始化鸽群优化算法的参数,如地图罗盘算子、种群数量
,初始化鸽群优化算法的参数,如地图罗盘算子、种群数量 、最大迭代次数
、最大迭代次数 、
、 ,确定适应度函数,随机初始化鸽群的位置与速度。执行步骤6;,启动地图罗盘算子,迭代更新至,根据适应度值的大小确定
,确定适应度函数,随机初始化鸽群的位置与速度。执行步骤6;,启动地图罗盘算子,迭代更新至,根据适应度值的大小确定 及
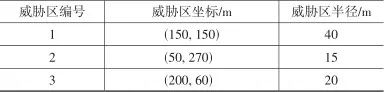
及 ;,得到;,是则继续,否则进行步骤2;的距离和预测距离的大小,如果,则沿着当前方向继续前进并进行步骤2;的距离为半径,向威胁区少的一侧旋转2°;的另一端点为虚拟目标点,沿直线前进到虚拟目标点,并进行步骤2。为1,斥力增益系数为100,单个威胁影响的最大距离范围为50 m,安全距离为0.5 m。
;,得到;,是则继续,否则进行步骤2;的距离和预测距离的大小,如果,则沿着当前方向继续前进并进行步骤2;的距离为半径,向威胁区少的一侧旋转2°;的另一端点为虚拟目标点,沿直线前进到虚拟目标点,并进行步骤2。为1,斥力增益系数为100,单个威胁影响的最大距离范围为50 m,安全距离为0.5 m。▼ 表1 突发威胁区参数
本文来源:《战术导弹技术》2022年第1期
- The End -
版权声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系删除。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!
