
在项目开发之初,我们会根据设计需求来选择符合要求的芯片。其中,RAM决定了程序运行时的内存大小,ROM决定了应用程序的存储空间大小。但对于应用功能特别大的项目,MCU内部的FLASH(ROM)存储空间就无法满足要求了。这个时候就需要外扩程序存储空间,而NOR FLASH就是其中一种解决方案。
文结合涉及到的技术点一一做了详细介绍和说明,包含如下四大内容:

一、KEIL下载程序配置及说明
通过对项目工程的配置,在KEIL在编译完工程后,会生成相应的HEX或BIN格式的程序烧录文件,点击Download下载按键后,会将烧录文件烧录到芯片中。
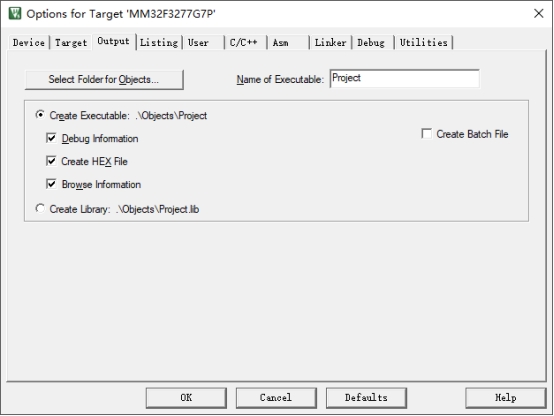
点击Option for Target魔术棒按键,在弹出的Option for Target窗口中的Output选项卡中设置生成程序烧录文件名,并勾选Create HEX file选项,如下图所示:
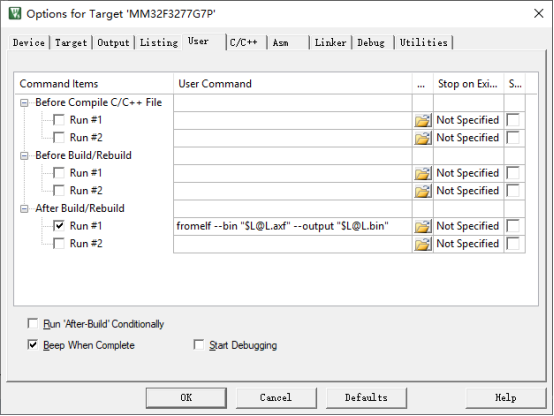
如果需要同时再生成BIN格式的程序烧录文件,我们可以在User选项卡中进行如下图的配置:
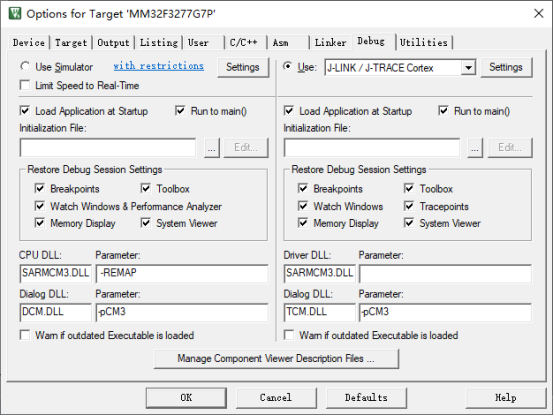
接着,在Debug选项卡中选择相应的调试下载工具。
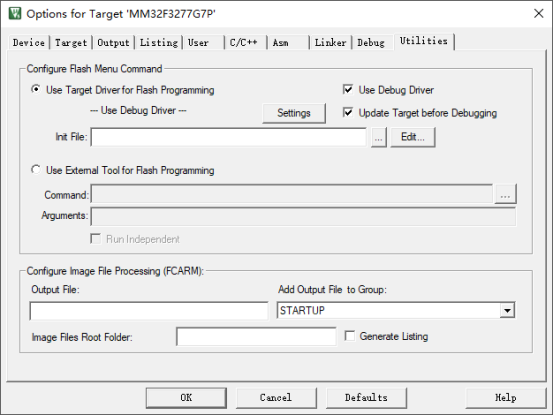
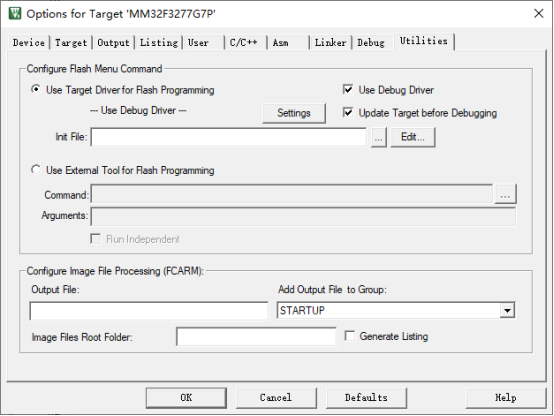
在Utilities选项卡中配置下载设置(使用与Debug相同的工具进行下载程序),如下图所示:
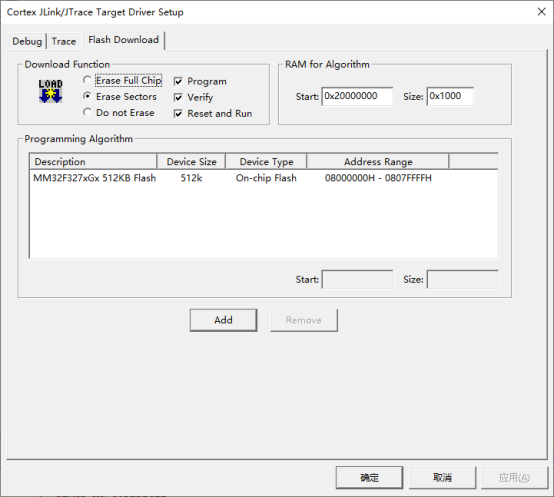
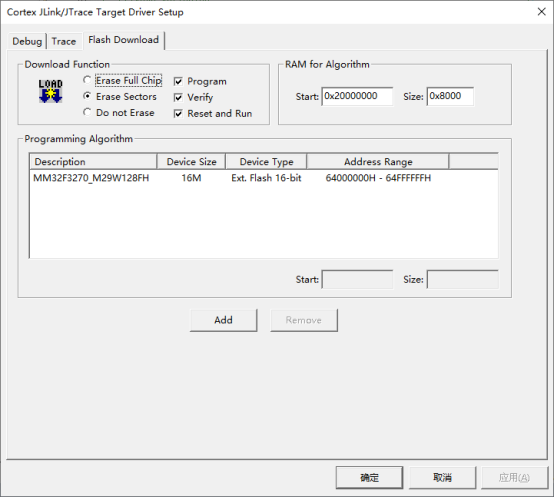
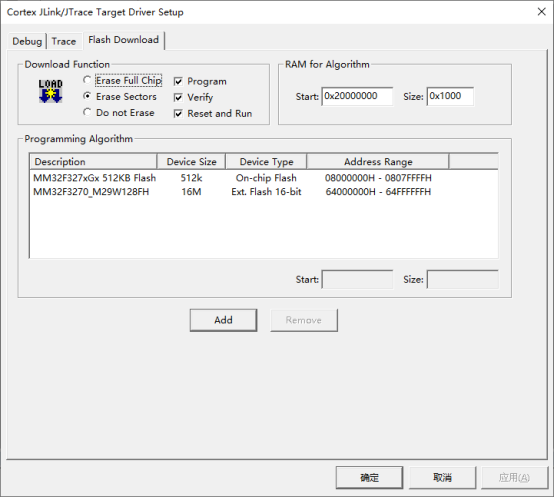
另外Utilities选项卡中,点击Settings按键,在弹出的窗口中Flash Download选项卡中进行如下配置:
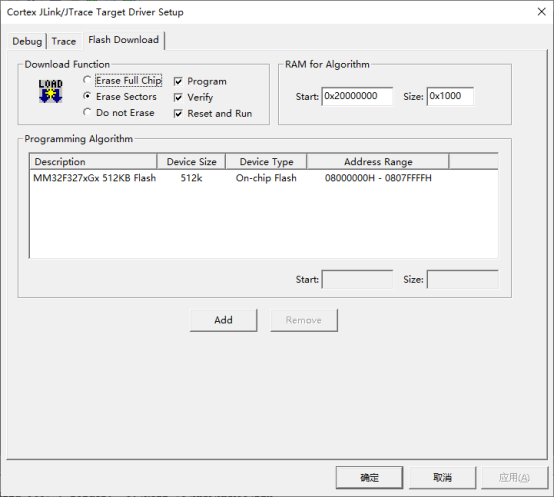
下载功能设置:包括擦出选择、编程、校验和下载完成后复位芯片并运行应用程序。
编程(下载)算法选择:一般在创建工程选择相应的芯片后,这边的下载算法就默认了,如果没有我们可以点击ADD按键添加相对应的下载算法;下载算法列举了描述、设备存储空间大小、设备类型以及地址区间范围。
编程(下载)算法在RAM中的位置:这个一般是默认的,START表示芯片RAM的起始地址,这个是由芯片决定的;SIZE表示最大支持的编程(下载)算法的程序空间大小,这个可以修改,但不得小于下载算法程序大小。
待这些都配置完成后,我们编译工程代码,无错误警告后,点击Download下载按键,即可下载应用程序到芯片中。
那么,在点击了Download按键后,那KEIL是如何将烧录程序下载到芯片中去的呢?
简单来说,就是KEIL软件根据配置将编程(下载)算法加载到芯片指定的RAM空间去(这个空间就是上述的以START作为起始地址,SIZE大小的RAM空间),并运行下载算法,对下载文件进行解析,将需要写入的数据通过下载算法写到指定的存储地址上,完成上述编程的过程。
二、MM32实现跳转到NOR FLASH运行程序
MM32F3270系列MCU支持存储控制器FSMC功能,可配置的静态存储器包括SRAM、NOR FLASH;另外还支持8080\6800接口,可以应用到LCD显示上。
NOR FLASH之所以可以运行程序,主要是因为其内部地址/数据线是分开的,支持字节访问,符合CPU指令译码执行的要求(NOR FLASH上储存了指令代码,MCU给NOR FLASH一个地址,NOR FLASH就向MCU返回相应地址上的数据,让MCU执行,中间不需要额外的处理操作)。
那通过上述的描述,使用MM32实现跳转到NOR FLASH运行程序,我们就只需要在基于MM32内部FLASH运行的基础上实现NOR FLASH与MCU之间的FSMC初始化配置,以及程序跳转这两个操作步骤,具体参考代码如下所示:
FSMC初始化配置:
/******************************************************************************** [url=home.php?mod=space&uid=288409]@file[/url] NOR.c* [url=home.php?mod=space&uid=187600]@author[/url] King* [url=home.php?mod=space&uid=895143]@version[/url] V1.00* [url=home.php?mod=space&uid=212281]@date[/url] 25-Jan-2021* [url=home.php?mod=space&uid=247401]@brief[/url] ......*******************************************************************************//* Define to prevent recursive inclusion -------------------------------------*/#define __NOR_C__/* Includes ------------------------------------------------------------------*/#include "NOR.h"/* Private typedef -----------------------------------------------------------*//* Private define ------------------------------------------------------------*//* Private macro -------------------------------------------------------------*//* Private variables ---------------------------------------------------------*//* Private function prototypes -----------------------------------------------*//* Private functions ---------------------------------------------------------*//* Exported variables --------------------------------------------------------*//* Exported function prototypes ----------------------------------------------*//******************************************************************************** @brief* @param* @retval* [url=home.php?mod=space&uid=93590]@Attention[/url]*******************************************************************************/void NOR_InitGPIO(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOD | RCC_AHBPeriph_GPIOE |RCC_AHBPeriph_GPIOF | RCC_AHBPeriph_GPIOG , ENABLE);GPIO_PinAFConfig(GPIOD, GPIO_PinSource14, GPIO_AF_12); /* FSMC_D0 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource15, GPIO_AF_12); /* FSMC_D1 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource0, GPIO_AF_12); /* FSMC_D2 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource1, GPIO_AF_12); /* FSMC_D3 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource7, GPIO_AF_12); /* FSMC_D4 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource8, GPIO_AF_12); /* FSMC_D5 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource9, GPIO_AF_12); /* FSMC_D6 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource10, GPIO_AF_12); /* FSMC_D7 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource11, GPIO_AF_12); /* FSMC_D8 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource12, GPIO_AF_12); /* FSMC_D9 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource13, GPIO_AF_12); /* FSMC_D10 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource14, GPIO_AF_12); /* FSMC_D11 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource15, GPIO_AF_12); /* FSMC_D12 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource8, GPIO_AF_12); /* FSMC_D13 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource9, GPIO_AF_12); /* FSMC_D14 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource10, GPIO_AF_12); /* FSMC_D15 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource0, GPIO_AF_12); /* FSMC_A0 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource1, GPIO_AF_12); /* FSMC_A1 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource2, GPIO_AF_12); /* FSMC_A2 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource3, GPIO_AF_12); /* FSMC_A3 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource4, GPIO_AF_12); /* FSMC_A4 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource5, GPIO_AF_12); /* FSMC_A5 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource12, GPIO_AF_12); /* FSMC_A6 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource13, GPIO_AF_12); /* FSMC_A7 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource14, GPIO_AF_12); /* FSMC_A8 */GPIO_PinAFConfig(GPIOF, GPIO_PinSource15, GPIO_AF_12); /* FSMC_A9 */GPIO_PinAFConfig(GPIOG, GPIO_PinSource0, GPIO_AF_12); /* FSMC_A10 */GPIO_PinAFConfig(GPIOG, GPIO_PinSource1, GPIO_AF_12); /* FSMC_A11 */GPIO_PinAFConfig(GPIOG, GPIO_PinSource2, GPIO_AF_12); /* FSMC_A12 */GPIO_PinAFConfig(GPIOG, GPIO_PinSource3, GPIO_AF_12); /* FSMC_A13 */GPIO_PinAFConfig(GPIOG, GPIO_PinSource4, GPIO_AF_12); /* FSMC_A14 */GPIO_PinAFConfig(GPIOG, GPIO_PinSource5, GPIO_AF_12); /* FSMC_A15 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource11, GPIO_AF_12); /* FSMC_A16 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource12, GPIO_AF_12); /* FSMC_A17 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource13, GPIO_AF_12); /* FSMC_A18 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource3, GPIO_AF_12); /* FSMC_A19 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource4, GPIO_AF_12); /* FSMC_A20 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource5, GPIO_AF_12); /* FSMC_A21 */GPIO_PinAFConfig(GPIOE, GPIO_PinSource6, GPIO_AF_12); /* FSMC_A22 */GPIO_PinAFConfig(GPIOD, GPIO_PinSource4, GPIO_AF_12); /* FSMC_NOE */GPIO_PinAFConfig(GPIOD, GPIO_PinSource5, GPIO_AF_12); /* FSMC_NWE */GPIO_PinAFConfig(GPIOD, GPIO_PinSource6, GPIO_AF_12); /* FSMC_NWAIT*/GPIO_PinAFConfig(GPIOG, GPIO_PinSource9, GPIO_AF_12); /* FSMC_NE2 *//* D00 - D01 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14 | GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOD, &GPIO_InitStructure);/* D02 - D03 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOD, &GPIO_InitStructure);/* D04 - D12 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 |GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12 |GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOE, &GPIO_InitStructure);/* D13 - D15 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOD, &GPIO_InitStructure);/* A00 - A05 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 |GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOF, &GPIO_InitStructure);/* A06 - A09 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 |GPIO_Pin_14 | GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOF, &GPIO_InitStructure);/* A10 - A15 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 |GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOG, &GPIO_InitStructure);/* A16 - A18 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOD, &GPIO_InitStructure);/* A19 - A22 */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4 |GPIO_Pin_5 | GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOE, &GPIO_InitStructure);/* NOE(PD4) NWE(PD5) configuration */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOD, &GPIO_InitStructure);/* NWAIT(PD6) configuration */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_Init(GPIOD, &GPIO_InitStructure);/* NE2(PG9) configuration */GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOG, &GPIO_InitStructure);}/******************************************************************************** @brief* @param* @retval* @attention*******************************************************************************/void NOR_InitFSMC(void){FSMC_InitTypeDef FSMC_InitStructure;FSMC_NORSRAM_Bank_InitTypeDef FSMC_BankInitStructure;RCC_AHB3PeriphClockCmd(RCC_AHB3ENR_FSMC, ENABLE);FSMC_NORSRAM_BankStructInit(&FSMC_BankInitStructure);FSMC_BankInitStructure.FSMC_SMReadPipe = 0;FSMC_BankInitStructure.FSMC_ReadyMode = 0;FSMC_BankInitStructure.FSMC_WritePeriod = 5; /* W:WE Pulse Width : [0, 63] */FSMC_BankInitStructure.FSMC_WriteHoldTime = 3; /* W:Address/Data Hold Time : [0, 3] */FSMC_BankInitStructure.FSMC_AddrSetTime = 3; /* W:Address Setup Time : [0, 3] */FSMC_BankInitStructure.FSMC_ReadPeriod = 8; /* R:Read Cycle Time : [0, 63] */FSMC_BankInitStructure.FSMC_DataWidth = FSMC_DataWidth_16bits;FSMC_NORSRAM_Bank_Init(&FSMC_BankInitStructure, FSMC_NORSRAM_BANK1);FSMC_NORSRAMStructInit(&FSMC_InitStructure);FSMC_InitStructure.FSMC_Mode = FSMC_Mode_NorFlash;FSMC_InitStructure.FSMC_TimingRegSelect = FSMC_TimingRegSelect_1;FSMC_InitStructure.FSMC_MemSize = FSMC_MemSize_64MB;FSMC_InitStructure.FSMC_MemType = FSMC_MemType_FLASH;FSMC_InitStructure.FSMC_AddrDataMode = FSMC_AddrDataDeMUX;FSMC_NORSRAMInit(&FSMC_InitStructure);}/******************************************************************************** @brief* @param* @retval* @attention*******************************************************************************/void NOR_Init(void){NOR_InitGPIO();NOR_InitFSMC();}/******************* (C) COPYRIGHT 2022 *************************END OF FILE***/
程序跳转代码:
/******************************************************************************** @file main.c* @author King* @version V1.00* @date 25-Jan-2021* @brief ......*******************************************************************************//* Define to prevent recursive inclusion -------------------------------------*/#define __MAIN_C__/* Includes ------------------------------------------------------------------*/#include "main.h"/* Private typedef -----------------------------------------------------------*/typedef void (*pFunction)(void);/* Private define ------------------------------------------------------------*/#define ApplicationAddress ((uint32_t)0x64000000)/* Private macro -------------------------------------------------------------*//* Private variables ---------------------------------------------------------*/uint32_t JumpAddress = 0;pFunction JumpToApplication;/* Private function prototypes -----------------------------------------------*//* Private functions ---------------------------------------------------------*//* Exported variables --------------------------------------------------------*//* Exported function prototypes ----------------------------------------------*//******************************************************************************** @brief* @param* @retval* @attention*******************************************************************************/int main(void){NOR_Init();/* Jump to code loaded in NOR memory and execute it ***********************/JumpAddress = *(volatile uint32_t *)(ApplicationAddress + 4);JumpToApplication = (pFunction)JumpAddress;/* Initialize user application's Stack Pointer */__set_MSP(*(volatile uint32_t *)ApplicationAddress);JumpToApplication();while(1);}/******************* (C) COPYRIGHT 2022 *************************END OF FILE***/
KEIL工程的相关配置:
三、基于MM32的NOR FLASH下载算法实现
在能够成功跳转到NOR FLASH运行程序后,我们就需要将应用程序下载到NOR FLASH就可以了。
结合第一小结,一般MCU自带的下载算法只是将程序下载到自身内部的FLASH存储空间,如果需要将程序下载到外扩的NOR FLASH,我们可以使用烧录工具,将程序烧录进NOR FLASH。但在开发调试过程中,这显然不太方便,所以我们就需要自行编写下载算法,来实现MM32与NOR FLASH之间的程序编程。
应该怎么去编写这个下载算法呢?
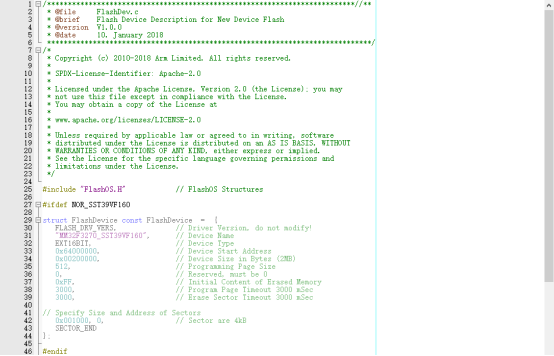
首先,在KEIL的安装路径下:C:\Keil_v5\ARM\Flash有一个_Template的下载算法工程模板,我们将其直接拷贝一份,重命名为MM32F3270_NOR_FLM;打开KEIL工程,里面主要有两个文件FlashDev.c和FlashPrg.c
FlashDev.c主要是用来描述存储特性的,包括Device Name、Device Type、Device Start Address、Device Size in Bytes等等,这些特性的值,我们可以根据NOR FLASH的特性值来填写,编程超时时间和擦出超时时间可以尽量长一些,做些冗余,具体参考如下所示:
FlashPrg.c就是用来实现编程下载算法的接口函数,其中有些函数是必须实现的,有些函数则是可选择的,如下所示:
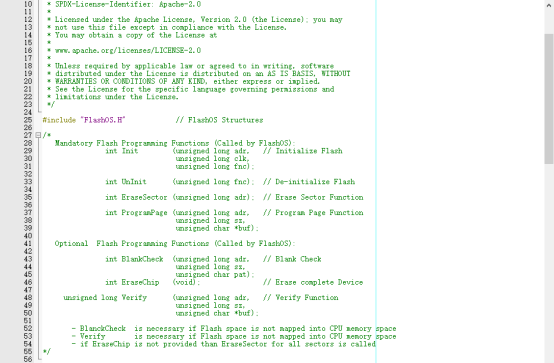
我们需要实现的就是通过对这些函数的补充实现,来达到NOR FLASH的读写操作,实现将程序下载到NOR FLASH。
在第一小节,我们知道下载算法是需要先加载到RAM中运行,再去进行编程操作的,对于这个加载到RAM空间的下载算法程序空间大小其实是有大小限制有,根据每个芯片的RAM大小而定,但最大也不能超过0x10000。
所以,我们在实现自己定义的下载算法的时候就尤其需要注意,尽量的不去使用库函数,以使用寄存器或者是直接操作芯片内部地址最佳,这样可以最大程序的节省程序空间。
不过,这也会使代码的阅读理解变得有些困难。因为下载算法运行的程序不能够实现的在线调试,所以对于NOR FLASH操作的这些函数功能,最好在其它工程上先进行验证,确认功能正常后,再移植到下载算法的工程当中来。
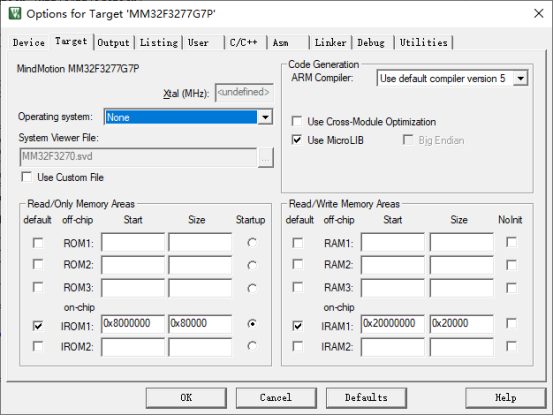
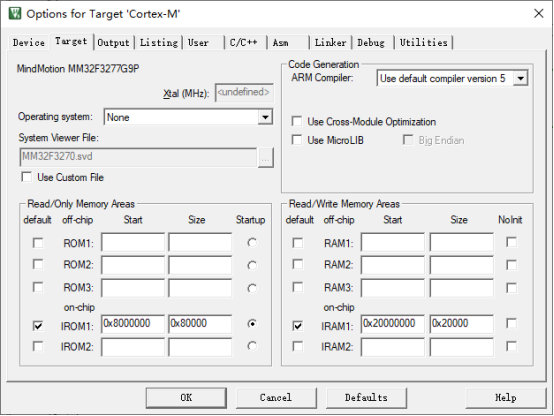
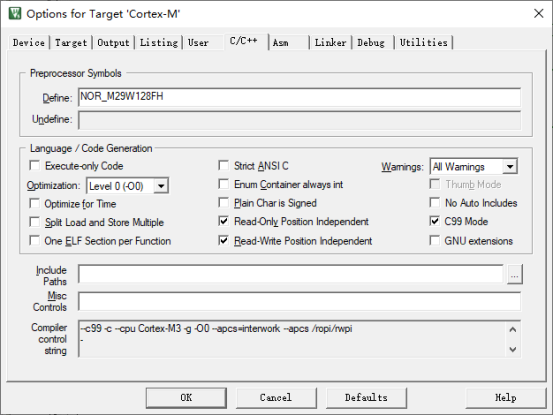
接下来,就是点击KEIL工程魔术棒按键对工程进行设置。在Target选项卡中选择芯片型号为MM32F3277G9P,在C/C++选项卡中根据需要进行宏定义(因为这个下载算法,支持多个NOR FLASH,所以我这边有相应的宏定义),在添加好NOR FLASH的相关函数,并补全接口函数后,进行编译。
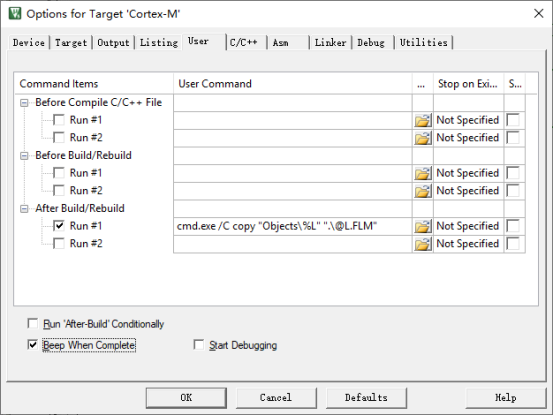
此时工程目录中就会生成一个FLM文件(因为在User选项卡中有一个命令:cmd.exe /C copy "Objects\%L" ".\@L.FLM",它会将编译后的文件转换成FLM格式)
我们将这个生成的FLM下载算法文件拷贝到C:\Keil_v5\ARM\Flash目录下,在后面工程使用到的时候就可以添加进来了。
四、MM32实现NOR FLASH应用程序编程,下载程序并运行
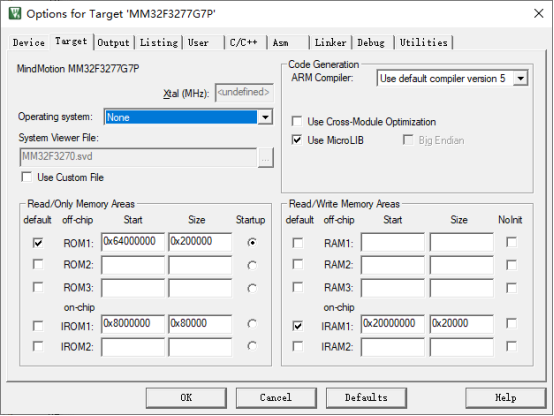
对于运行在NOR FLASH中的MM32程序来说,程序编写并没有特殊的要求,唯一不同的就是对于KEIL工程的设置。例程中,我们只实现了LED灯的闪烁功能,功能比较简单。对于KEIL工程的设置,如下图所示:
将默认的程序空间和程序启动空间设置为NOR FLASH的起始地址作为开始:
根据DEBUG调试工具进行对应的选择:
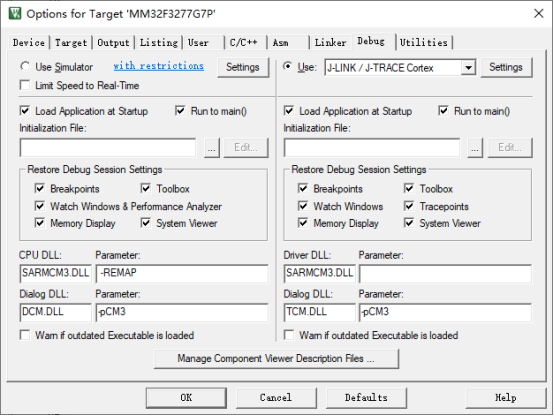
下载工具与调试工具相同:
将编程(下载)算法选择为第三小节生成的FLM算法,在添加进来的时候,就会自动显示相应的描述信息:
这样配置完成后,编译后点击下载按键,程序就被下载到NOR FLASH外部存储空间了。因为勾选了RESET AND RUN,下载完成后会复位MCU,此时MCU FLASH中已经存在了跳转程序,这个时候就会跳转到NOR FLASH执行LED闪烁程序。此时LED灯若能够正常运行,就说明程序功能已经正常运行了。
另外,有些小伙伴可能会问,在Option for Target窗口Utilities选项卡中,有看到Init File会配置一个INI文件,我上述的工程配置中却没有,这是怎么回事呢?
这边的INI文件包含的是对MCU内部地址配置相应参数值的数据,是在下载程序前先对MCU进行设置的操作。一般看到的就是对MCU与NOR FLASH的FSMC相关寄存器进行配置,好让下载算法能够正常的去操作NOR FLASH。但我的配置截图中却没有,是因为在实现下载算法时的INIT函数,已经实现了对FSMC的初始化配置,所以在INIT FILE的位置就不需要再重复操作了。
五、后续
有了这个下载算法,我们可以将部分程序或数据指令到外部存储空间;如果当我们通过LCD显示图片数据时,图片数据是一个很大的数组,我们就可以将这些数据指定到NOR FLASH中,而应用程序还是在MCU内部的FLASH中运行,操作如下图所示:
芯片有两个ROM空间,但默认的和启动的为MCU内部FLASH:
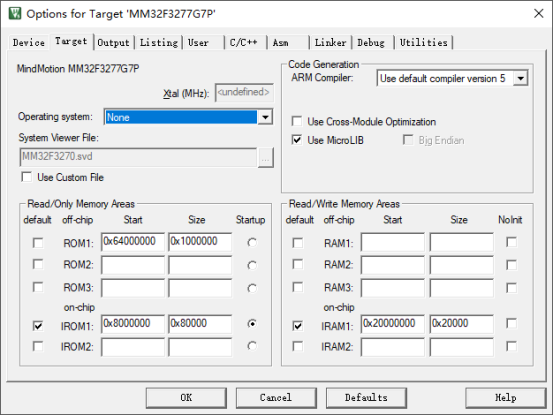
下载算法有两个,这两个的地址是不一样的,一个是MCU内部FLASH,一个是外扩的NOR FLASH:
将程序指定到NOR FLASH的方法,右击.C文件,选择Options for File ”IMAGE1.c”...
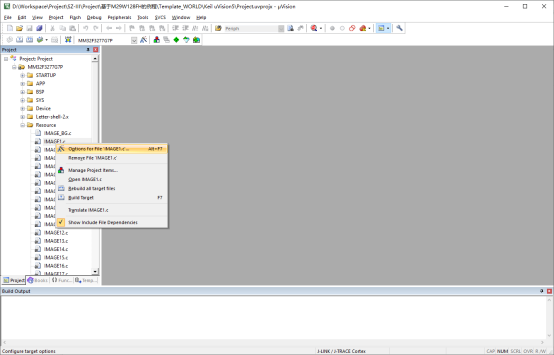
在弹出的窗口中将CODE/CONST指令到ROM1,如下图所示:
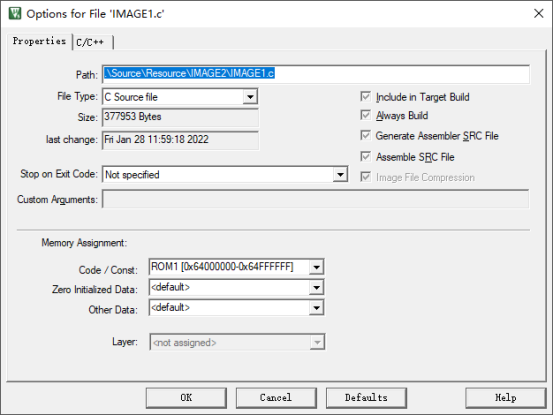
然后在程序中再调用IMAGE1.c文件中的数据,这样在编译后下载程序的时候,会先下载程序到MCU的FLASH,再下载图片数据到MCU扩展的NOR FLASH。
本文中的硬件是基本神舟III开发板实现的,MCU使用的是灵动微电子的MM32F3277G9P,NOR FLASH使用的是M29W128FH。
至此分享就结束了,希望能对各位小伙伴有所帮助!另外,如果有需要查看原图和代码的小伙伴,请点击底部“阅读原文”进行下载。
