


来源 | 雷达信号处理matlab
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
声明 | 本号聚焦相关知识分享,内容观点不代表本号立场,可追溯内容均注明来源,若存在版权等问题,请联系(15881101905,微信同号)删除,谢谢。
噪声环境下的信号检测
对雷达接收信号进行正交双路匹配滤波、平方律检波和判决的简化框图如下图所示。假设雷达接收机的输入信号由目标回波信号
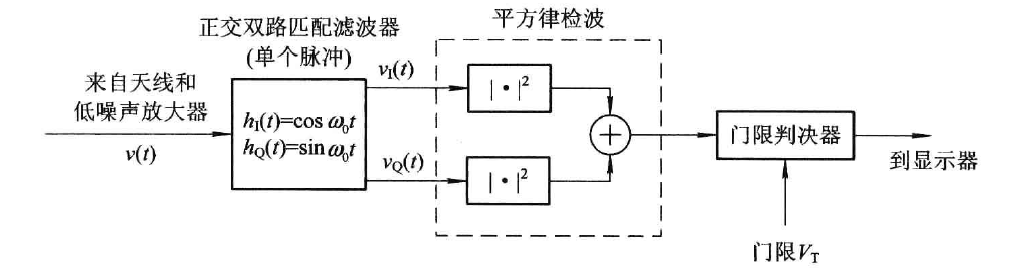
匹配滤波器的输出信号可以表示为

其中,
匹配滤波器的输出是复随机变量,其组成或者只有噪声,或者是噪声加上目标回波信号(幅度为

对应噪声加上目标回波信号情况的同相和正交分量为

其中,噪声的同相和正交分量

随机变量

其中,
在这种情况下,

则

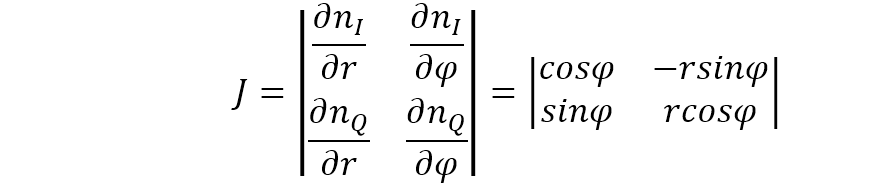
将上式对

式中

这里

当

对

其中

为标准正态分布函数。
当只有噪声(
虚警概率
虚警概率
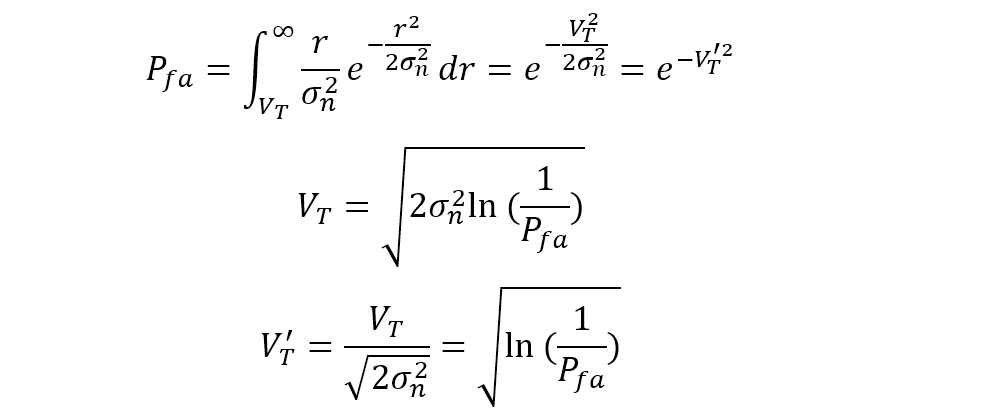
其中,
上述公式反映了门限电压
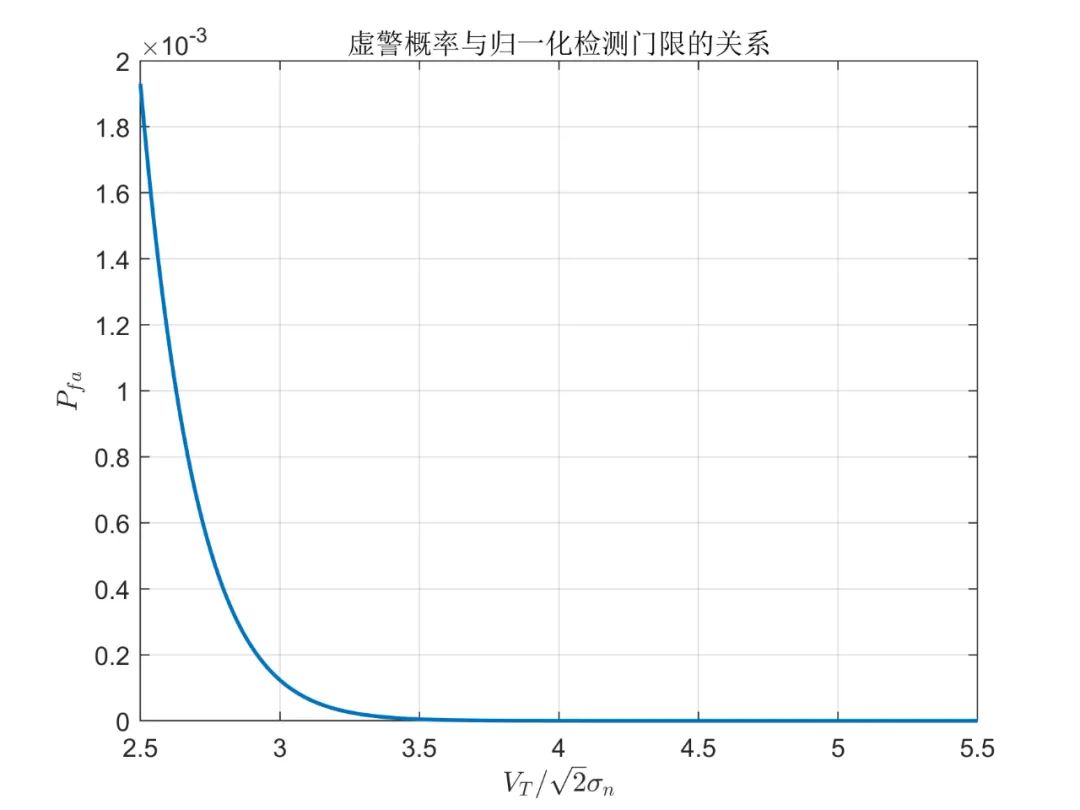
虚警时间

其中,

使虚警时间最小意味着增加门限值,导致雷达的最大检测距离会减小。因此,
表征虚警的大小有时还用虚警次数

Marcum 将虚警次数定义为
检测概率
检测概率

如果假设雷达信号是幅度为
对于
下图给出了在不同虚警概率
为了避免检测概率计算中的数值积分,简化

其中,余误差函数为

由上述式子可得出对于给定的

当较小

其中,
Parl 算法计算单个脉冲检测概率的过程如下图所示,调用该函数即可得到相应的检测概率。
- The End -
版权声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系删除。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!
