大家都知道函数调用是通过栈来实现的,而且知道在栈中存放着该函数的局部变量。但是对于栈的实现细节可能不一定清楚。本文将介绍一下在Linux平台下函数栈是如何实现的。
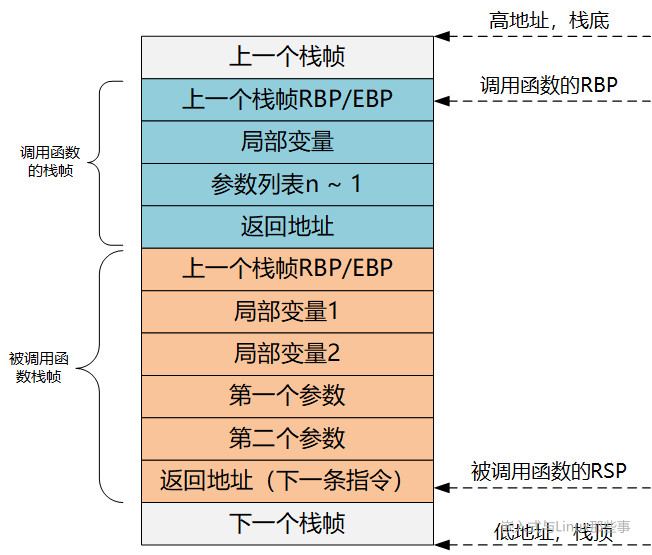
栈帧的结构 函数在调用的时候都是在栈空间上开辟一段空间以供函数使用,所以,我们先来了解一下通用栈帧的结构。
如图所示,栈是由高地址向地地址的方向生长的,而且栈有其栈顶和栈底,入栈出栈的地方就叫做栈顶。
在x86系统的CPU中,rsp是栈指针寄存器,这个寄存器中存储着栈顶的地址。rbp中存储着栈底的地址。函数栈空间主要是由这两个寄存器来确定的。
当程序运行时,栈指针rsp可以移动,栈指针和帧指针rbp一次只能存储一个地址,所以,任何时候,这一对指针指向的是同一个函数的栈帧结构。
而帧指针rbp是不移动的,访问栈中的元素可以用-4(%rbp)或者8(%rbp)访问%rbp指针下面或者上面的元素。
在明白了这些之后,下面我们来看一个具体的例子:
#include int sum (int a,int b) int c = a + b;return c;int main () int x = 5 ,y = 10 ,z = 0 ;printf ("%d\r\n" ,z);return 0 ;反汇编如下,下面我们就对照汇编代码一步一步分析下函数调用过程中栈的变化。
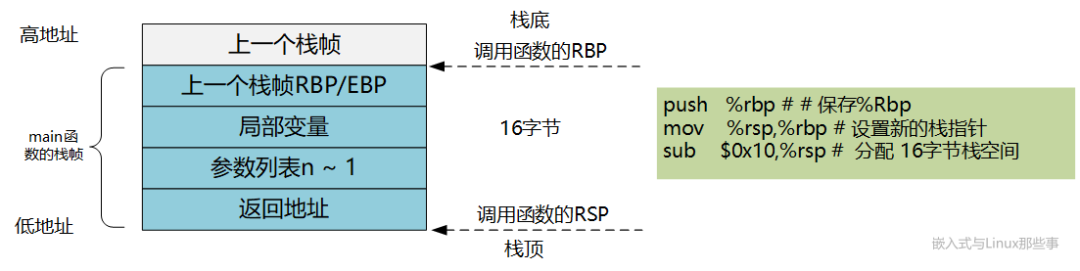
0000000000000000 :# 参数传递 # 参数传递 fc mov %eax,-0x4(%rbp) # 局部变量 fc mov -0x4(%rbp),%eax # 存储结果 :# 保存%rbp。rbp,栈底的地址 # 设置新的栈指针。rsp 栈指针,指向栈顶的地址 $0x10 ,%rsp # 分配 16字节栈空间。%rsp = %rsp-16 $0x5 ,-0xc(%rbp) # 赋值 $0xa ,-0x8(%rbp) # 赋值 fc 00 00 00 00 movl $0x0 ,-0x4(%rbp) # 赋值 # 参数传递 ,从右向左 # 参数传递 # 调用sum fc mov %eax,-0x4(%rbp) fc mov -0x4(%rbp),%eax # 存储计算结果 # 55 $0x0 ,%eax$0x0 ,%eax 函数调用前 在函数被调用之前,调用者会为调用函数做准备。首先,函数栈上开辟了16字节的空间,存储定义的3个int型变量,建立了main函数的栈。
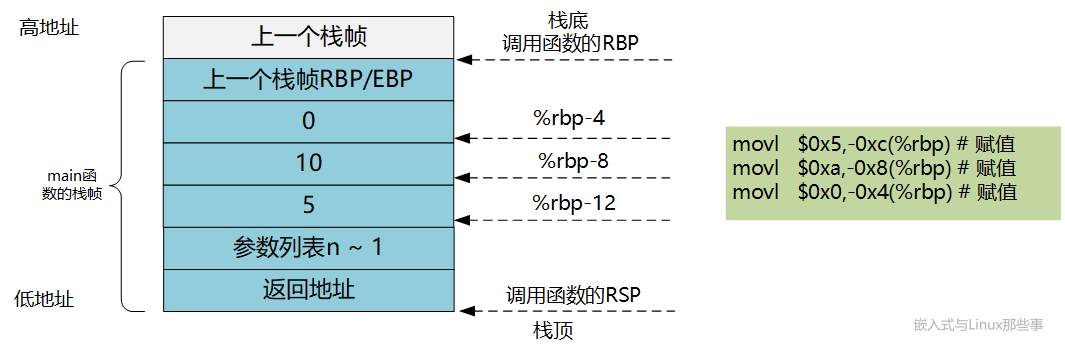
接着,会给三个变量进行赋值。
以下4行代码是进行参数传递。我们可以看到是函数参数是倒序传入的:先传入第N个参数,再传入第N-1个参数(CDECL约定)。
mov -0x8(%rbp),%edx # 参数传递 ,从右向左 # 参数传递 最后,会执行到call指令处,调用sum函数。
callq 46 # 调用sum CALL指令内部其实还暗含了一个将返回地址(即CALL指令下一条指令的地址)压栈的动作(由硬件完成)。
具体来说,call指令执行时,先把下一条指令的地址入栈,再跳转到对应函数执行的起始处。
函数调用时 进入sum函数后,我们看到函数的前两行:
push %rbp 这两条汇编指令的含义是:首先将rbp寄存器入栈,然后将栈顶指针rsp赋值给rbp。
“mov rbp rsp”这条指令表面上看是用rsp覆盖rbp原来的值,其实不然。
因为给rbp赋值之前,原rbp值已经被压栈(位于栈顶),而新的rbp又恰恰指向栈顶。此时rbp寄存器就已经处于一个非常重要的地位。
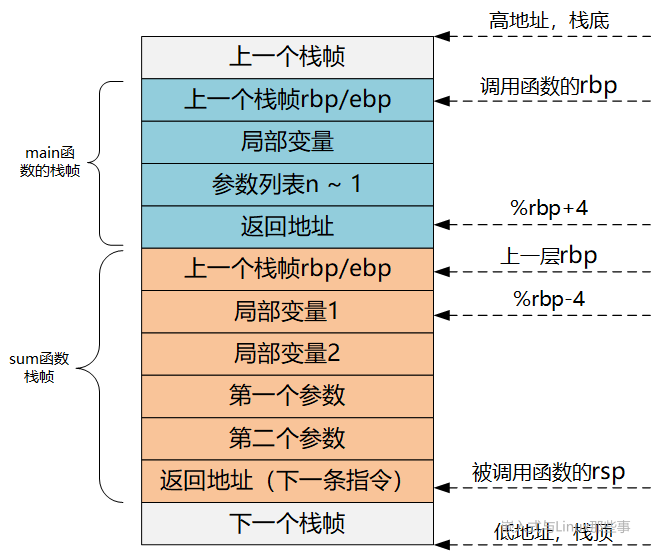
该寄存器中存储着栈中的一个地址(原rbp入栈后的栈顶),从该地址为基准,向上(栈底方向)能获取返回地址、参数值,向下(栈顶方向)能获取函数局部变量值,而该地址处又存储着上一层函数调用时的rbp值。
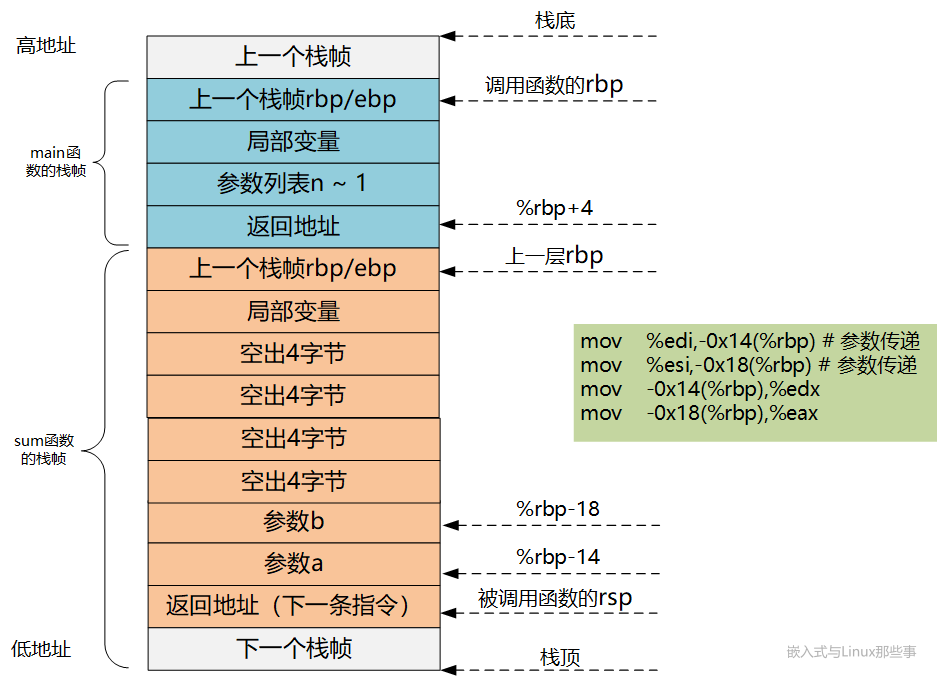
一般而言,%rbp+4处为返回地址,%rbp+8处为第一个参数值(最后一个入栈的参数值,此处假设其占用4字节内存),%rbp-4处为第一个局部变量,%rbp处为上一层rbp值。
由于rbp中的地址处总是“上一层函数调用时的rbp值”,而在每一层函数调用中,都能通过当时的%rbp值“向上(栈底方向)”能获取返回地址、参数值,“向下(栈顶方向)”能获取函数局部变量值。
紧接着执行的四条指令。
mov %edi,-0x14(%rbp) # 参数传递 # 参数传递 上述指令通过rbp加偏移量的方式将main传递给sum的两个参数保存在当前栈帧的合适位置,然后又取出来放入寄存器,看着有点儿多此一举,这是因为在编译时未给gcc指定优化级别,而gcc编译程序时,默认不做任何优化,所以看起来比较啰嗦。
需要说明的是,sum的两个参数和返回值都是int,在内存中只占4个字节,而图中每个栈内存单元按8字节地址边界进行了对齐,所以才是下图中这个样子。
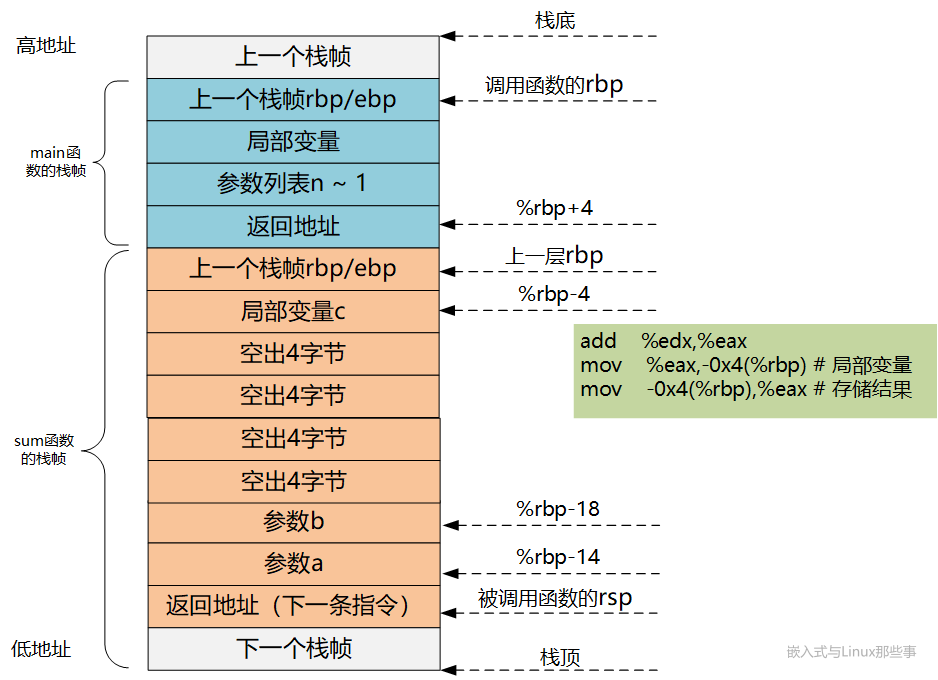
再来看紧接着的三条指令。
add %edx,%eax # 局部变量 # 存储结果 上述第一条指令负责执行加法运算并将并将结果存入eax中,第二条指令将eax中的值存入局部变量c所在的内存,第三条指令将局部变量c的值读取到eax中,可以看到,局部变量c被编译器安排到了%rbp -0x4这个地址对应的内存中。
接下来继续执行
pop %rbp这两条指令的功能相当于下面的指令:
mov %rbp,%rsp即在操作上面两条指令的时候,首先把rsp赋值,它的值是存储调用函数rbp的值的地址,所以可以通过出栈操作,来给rbp赋值,来找回调用函数的rbp。
通过栈的结构,可以知道,rbp上面就是调用函数调用被调用函数的下一条指令的执行地址,所以需要赋值给rip,来找回调用函数里的指令执行地址。
整个函数跳转回main的时候,他的rsp,rbp都会变回原来的main函数的栈指针,C语言程序就是用这种方式来确保函数的调用之后,还能继续执行原来的程序。
函数调用后 函数最后返回的时候,继续执行下面这条指令:
mov %eax,-0x4(%rbp) # 把sum函数的返回值赋给变量z 上述指令将eax中的结果放入rbp -0x4所指的内存中,这里也是main的局部变量z所在位置。
再往后的指令如下:
mov %eax,-0x4(%rbp) # 计算结果 $0x0 ,%eax上述指令首先为printf准备参数,然后调用printf,具体过程和调用sum的过程相似,让CPU直接执行到main倒数第二条leave指令处。
mov $0x0 ,%eax 指令作用是将main返回值0放到寄存器eax,等main返回后调用main可拿到这个值。
执行leave指令相当于执行如下两条指令:
mov %rbp, %rspleave指令首先将rbp的值复制给rsp,rsp就指向rbp所指的栈单元。之后leave指令将该栈单元的值pop给rbp,如此,rsp和rbp就恢复成刚进入main时的状态。