

自动驾驶汽车需要实时快速和精确的地理定位,才能高效安全地行驶。
高精度定位是当前无人驾驶的重要一环,也让不少小伙伴为之愁掉头发。提到定位,大家可能首先想到的是GPS,视觉SLAM、激光SLAM等。但单一传感器定位存在一些不足,自动驾驶仅依靠单一传感器很难实现精准定位。
多传感器融合是一项综合性前沿技术,已成为自动驾驶及机器人的主流定位方案,是目前移动机器人与自动驾驶的核心技术及其他功能单元的基础。涉及内容广泛且繁杂,包括传感器的标定、数据处理、SLAM、滤波等。
基于此,深蓝学院开设『多传感器融合定位』在线课程。课程将多传感器融合涉及到的主要内容以及落地经验分享给大家,最终带领大家实现激光雷达+GPS+IMU+轮速计的传感器融合定位系统。
原自动驾驶公司研发总监
从2011年起,开始进入惯性导航、多传感器融合定位领域,具有多种精度等级、多种配置、多种场景下的传感器融合定位系统成功研发经验。在IEEE Transactions on lndustrial Electronics,Sensors and Actuators等SCI期刊上发表文章,并撰写知乎专栏《SLAM与多传感器融合定位》(累计阅读30万+)。
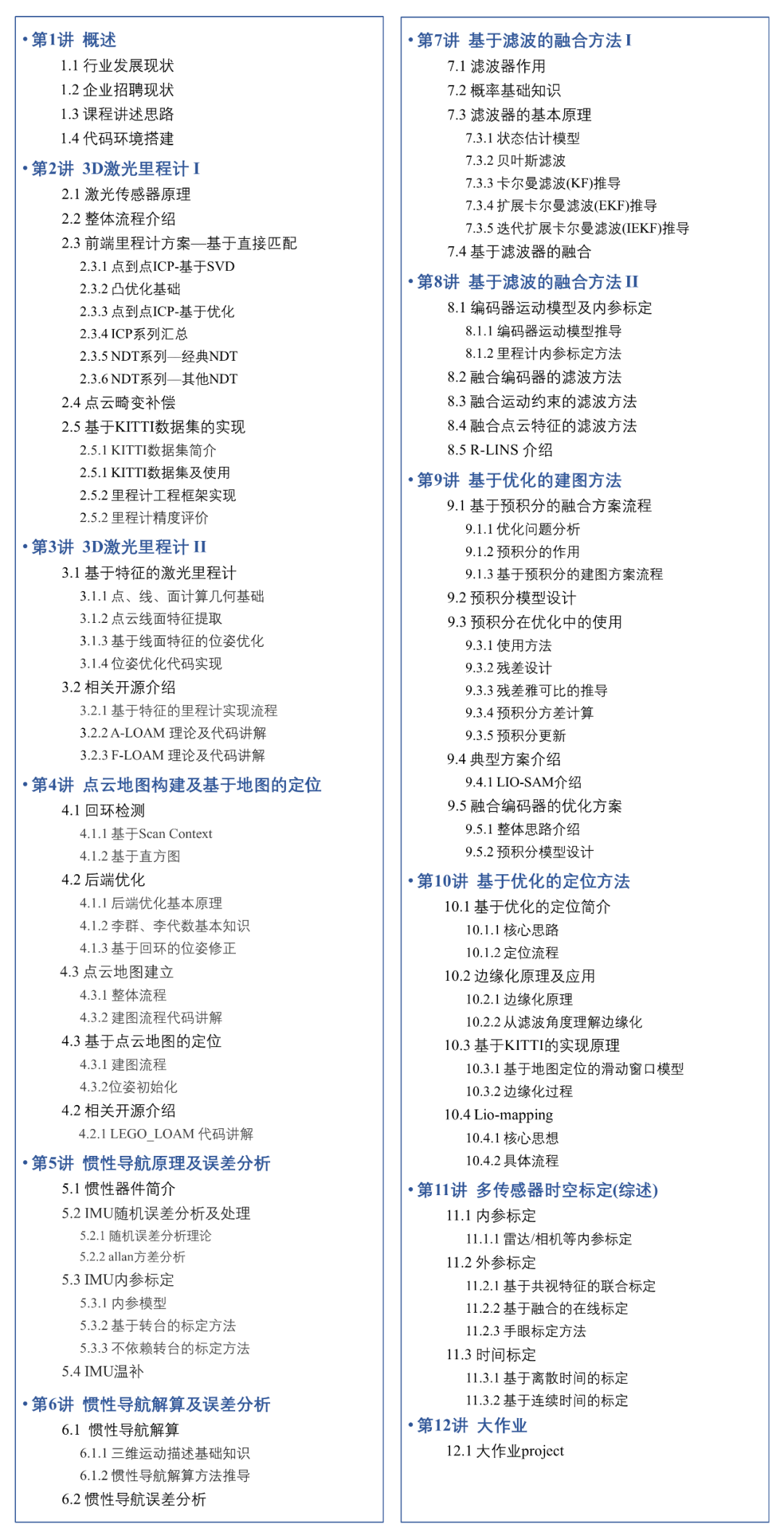
(点击查看大图)
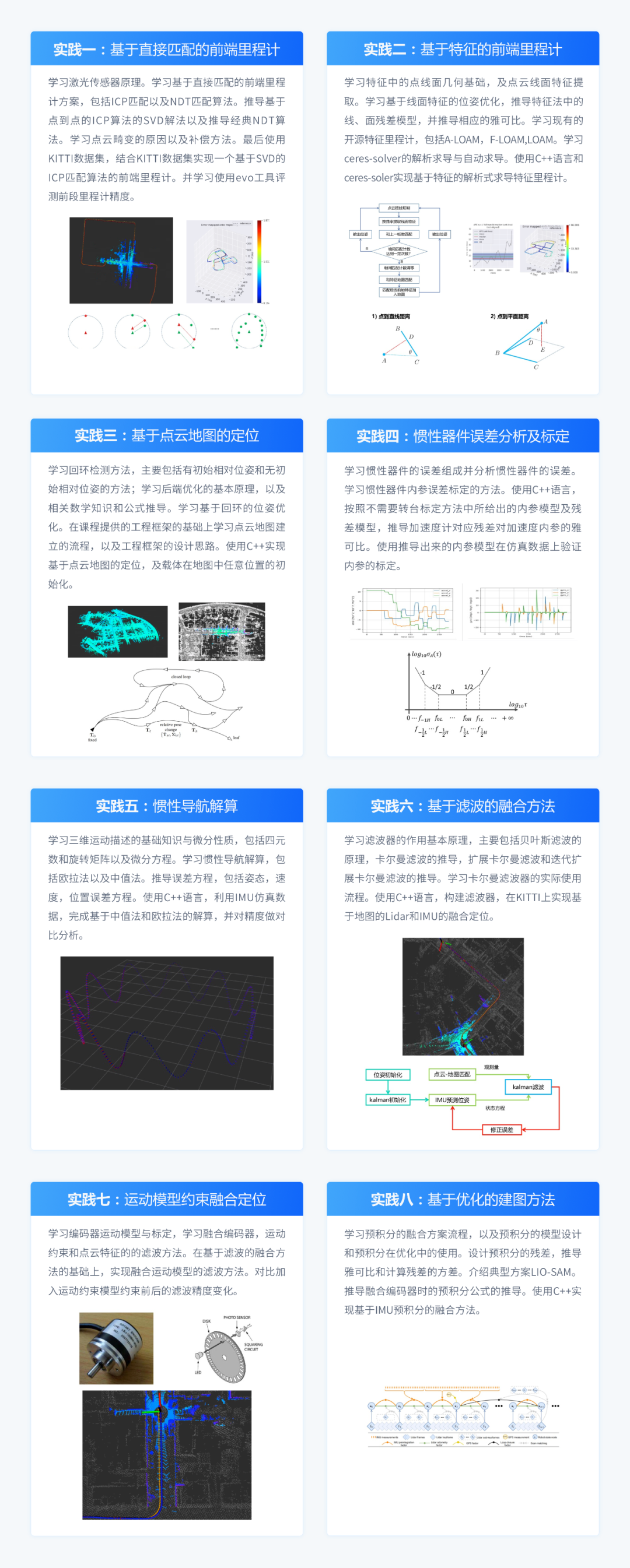
(点击查看大图)
1. 掌握常用3D激光SLAM算法的原理以及代码实现,并具备根据需求改进算法的能力;
4. 熟悉基于滤波的和基于图优化的多传感器融合方法,并有能力实现一套融合系统。

1. 三师助力
讲师&助教及时答疑解惑,班主任全程带班督学,帮你克服拖延,不断进步。

