
引言
如何利用iCE40UP5K 的FPGA平台上的ADC制作一个0-3.3V的数字电压表?来自河南工业大学的【raincorn】同学在电子森林详细分享了他寒假练所做的电压表项目,点击文章底部“阅读原文”获取源码,转载请注明出处。
1

目标
2
Σ-Δ ADC采样
AD9280是一款单芯片、8位、32 MSPS模数转换器(ADC),采用单电源供电,内置一个片内采样保持放大器和基准电压源。它采用多级差分流水线架构,数据速率达32 MSPS,在整个工作温度范围内保证无失码。
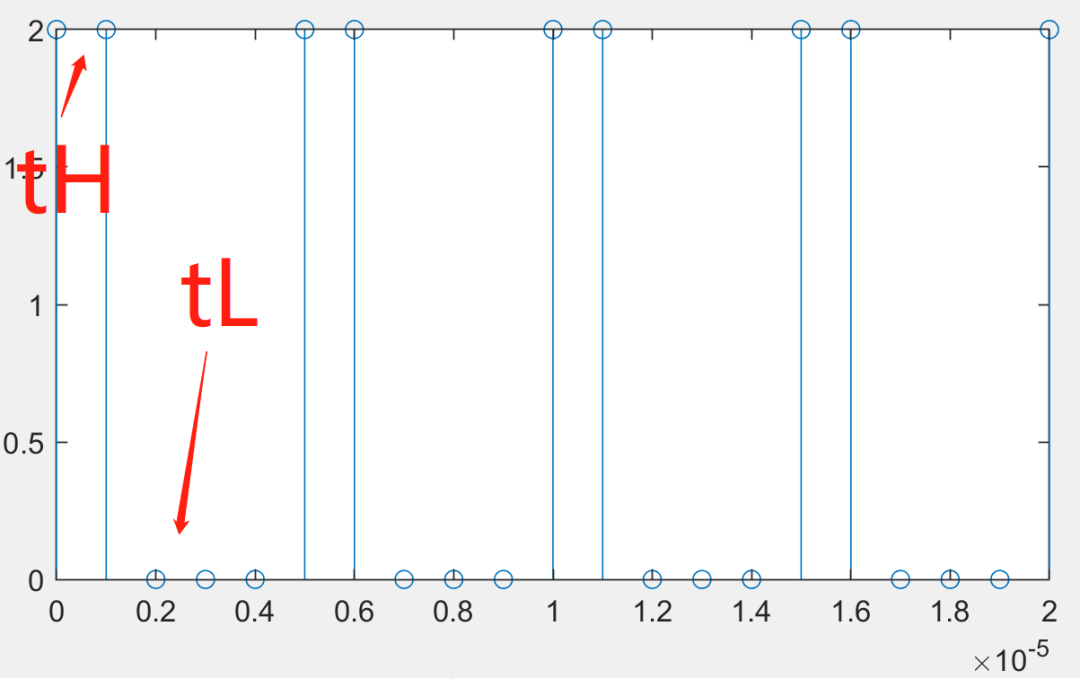
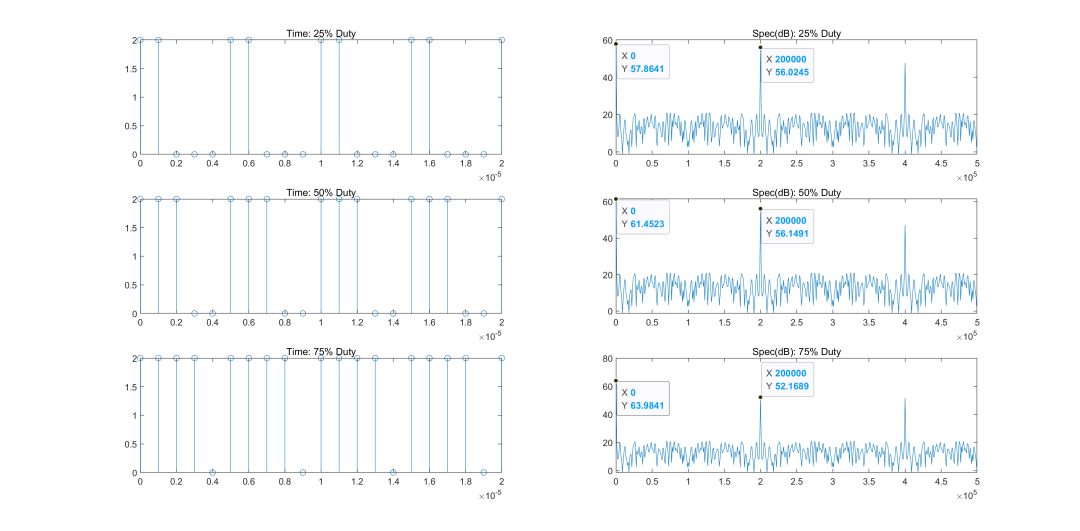
close all;clear;clc;fs = 1e6; %sample rate is 1Mt = 0:1/fs:1e-1-1/fs; %generate the data between 0-1ms to rise the fft resulationn = length(t);n_index = 0:n-1;f_index = n_index*fs/n;% 25%x = square(2*pi*200e3*t,25) + 1; %generate the PWM with special dutysubplot(321);stem(t,x);axis([0 2e-5 0 2]);title("Time: 25% Duty");mag_x= 20*log10(abs(fft(x)));subplot(322);plot(f_index(1:n/2),mag_x(1:n/2));title("Spec(dB): 25% Duty");% 50%x = square(2*pi*200e3*t,50) + 1; %generate the PWM with special dutysubplot(323);stem(t,x);axis([0 2e-5 0 2]);title("Time: 50% Duty");mag_x= 20*log10(abs(fft(x)));subplot(324);plot(f_index(1:n/2),mag_x(1:n/2));title("Spec(dB): 50% Duty");% 75%x = square(2*pi*200e3*t,75) + 1; %generate the PWM with special dutysubplot(325);stem(t,x);axis([0 2e-5 0 2]);title("Time: 75% Duty");mag_x= 20*log10(abs(fft(x)));subplot(326);plot(f_index(1:n/2),mag_x(1:n/2));title("Spec(dB): 75% Duty");
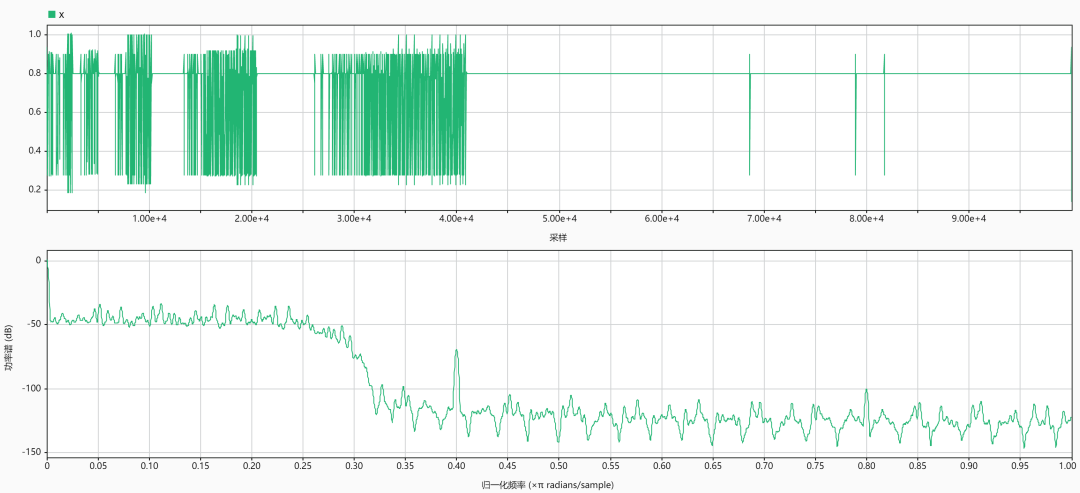
优点:便于直流分量的提取,减小滤波后直流信号出现波动。 缺点:提高时间常数,电路的响应速度降低。
优点:时间常数小,电路响应速度快。 缺点:由于截至频率提高,因此需要更大的采样率才能达到较好的效果。
wire [7:0] pwm_val;wire sample_rdy;ADC_top u_ADC_top(.clk_in(clk_pwm_adc),.rstn(sys_rst_n),.digital_out(pwm_val),.analog_cmp(pwm_adc_in),.analog_out(pwm_adc_out),.sample_rdy(sample_rdy));
3
BCD码生成
module bcd_8421(input wire sys_clk , //系统时钟,频率50MHzinput wire sys_rst_n , //复位信号,低电平有效input wire [19:0] data , //输入需要转换的数据output reg [3:0] unit , //个位BCD码output reg [3:0] ten , //十位BCD码output reg [3:0] hun , //百位BCD码output reg [3:0] tho , //千位BCD码output reg [3:0] t_tho , //万位BCD码output reg [3:0] h_hun //十万位BCD码);//********************************************************************////******************** Parameter And Internal Signal *****************////********************************************************************////reg definereg [4:0] cnt_shift ; //移位判断计数器reg [43:0] data_shift ; //移位判断数据寄存器reg shift_flag ; //移位判断标志信号//********************************************************************////***************************** Main Code ****************************////********************************************************************////cnt_shift:从0到21循环计数always@(posedge sys_clk or negedge sys_rst_n)if(sys_rst_n == 1'b0)cnt_shift <= 5'd0;else if((cnt_shift == 5'd21) && (shift_flag == 1'b1))cnt_shift <= 5'd0;else if(shift_flag == 1'b1)cnt_shift <= cnt_shift + 1'b1;elsecnt_shift <= cnt_shift;//data_shift:计数器为0时赋初值,计数器为1~20时进行移位判断操作always@(posedge sys_clk or negedge sys_rst_n)if(sys_rst_n == 1'b0)data_shift <= 44'b0;else if(cnt_shift == 5'd0)data_shift <= {24'b0,data};else if((cnt_shift <= 20) && (shift_flag == 1'b0))begindata_shift[23:20] <= (data_shift[23:20] > 4) ? (data_shift[23:20] + 2'd3) : (data_shift[23:20]);data_shift[27:24] <= (data_shift[27:24] > 4) ? (data_shift[27:24] + 2'd3) : (data_shift[27:24]);data_shift[31:28] <= (data_shift[31:28] > 4) ? (data_shift[31:28] + 2'd3) : (data_shift[31:28]);data_shift[35:32] <= (data_shift[35:32] > 4) ? (data_shift[35:32] + 2'd3) : (data_shift[35:32]);data_shift[39:36] <= (data_shift[39:36] > 4) ? (data_shift[39:36] + 2'd3) : (data_shift[39:36]);data_shift[43:40] <= (data_shift[43:40] > 4) ? (data_shift[43:40] + 2'd3) : (data_shift[43:40]);endelse if((cnt_shift <= 20) && (shift_flag == 1'b1))data_shift <= data_shift << 1;elsedata_shift <= data_shift;//shift_flag:移位判断标志信号,用于控制移位判断的先后顺序always@(posedge sys_clk or negedge sys_rst_n)if(sys_rst_n == 1'b0)shift_flag <= 1'b0;elseshift_flag <= ~shift_flag;//当计数器等于20时,移位判断操作完成,对各个位数的BCD码进行赋值always@(posedge sys_clk or negedge sys_rst_n)if(sys_rst_n == 1'b0)beginunit <= 4'b0;ten <= 4'b0;hun <= 4'b0;tho <= 4'b0;t_tho <= 4'b0;h_hun <= 4'b0;endelse if(cnt_shift == 5'd21)beginunit <= data_shift[23:20];ten <= data_shift[27:24];hun <= data_shift[31:28];tho <= data_shift[35:32];t_tho <= data_shift[39:36];h_hun <= data_shift[43:40];endendmodule
wire [15:0] dis_dat_mult = dis_dat << 7; //The voltage multed by 128(3.3/256 = 0.01289) to get a similar numberwire [(6*8-1):0] dis_dat_buff; //The buffer of dis_datwire [3:0] dis_ten;wire [3:0] dis_hun;wire [3:0] dis_tho;wire [3:0] dis_t_tho;assign dis_dat_buff = {4'd0,dis_t_tho,".",4'd0,dis_tho,4'd0,dis_hun,4'd0,dis_ten,"V"};bcd_8421 u_bcd_8421(.sys_clk(clk), //系统时钟,频率50MHz.sys_rst_n(rst_n), //复位信号,低电平有效.data(dis_dat_mult), //输入需要转换的数据.unit(), //个位BCD码.ten(dis_ten), //十位BCD码.hun(dis_hun), //百位BCD码.tho(dis_tho), //千位BCD码.t_tho(dis_t_tho), //万位BCD码.h_hun() //十万位BCD码);
module voltmeter(// input in_clk, //Use the internal clock source to avoid restrictinput in_rst_n,input pwm_adc_in,// input debug, //The debug wire is connected to switch// output oled_csn, //The cs pin is disconnectedoutput oled_rst,output oled_dcn,output oled_clk,output oled_dat,output pwm_adc_out);wire sys_clk;HSOSC.CLKHF_DIV ("0b10")) u_HSOSC (.CLKHFEN (1'b1),.CLKHFPU (1'b1),.CLKHF (sys_clk));wire sys_rst_n,clk_gen_locked,clk_pwm_adc;assign sys_rst_n = in_rst_n & clk_gen_locked;clk_gen u_clk_gen(.ref_clk_i(sys_clk),.rst_n_i(in_rst_n),.lock_o(clk_gen_locked),.outcore_o(),.outglobal_o(clk_pwm_adc) //The pll out is connected with the global clock network);wire [7:0] pwm_val;//pwm_adc u_pwm_adc(//.sys_clk(clk_pwm_adc),//.sys_rst_n(sys_rst_n),//.pwm_adc_in(pwm_adc_in),//.pwm_val(pwm_val),//.pwm_adc_out(pwm_adc_out)//);wire sample_rdy;ADC_top u_ADC_top(.clk_in(clk_pwm_adc),.rstn(sys_rst_n),.digital_out(pwm_val),.analog_cmp(pwm_adc_in),.analog_out(pwm_adc_out),.sample_rdy(sample_rdy));oled12864 u_oled12864(.clk(sys_clk), //The system clock.rst_n(sys_rst_n), //The system reset.dis_dat(pwm_val),// .debug(debug),.oled_csn(), //OLED ENABLE.oled_rst(oled_rst), //OLED RESET.oled_dcn(oled_dcn), //OLED DATA/COMMAND CONTROL.oled_clk(oled_clk), //OLED CLOCK.oled_dat(oled_dat) //OLED DATA);endmodule
5
其他

END
硬禾学堂
硬禾团队一直致力于给电子工程师和相关专业的同学,带来规范的核心技能课程,帮助大家在学习和工作的各个阶段,都能有效地提升自己的职业能力。

硬禾学堂
我们一起在电子领域探索前进
关注硬禾公众号,随时直达课堂

点击阅读原文查看更多

