

1
项目介绍
本项目使用硬禾学堂在“2022年寒假在家一起练”活动中提供的基于树莓派RP2040的嵌入式系统学习平台,使用 MicroPython平台进行编程,利用平台提供的姿态传感器以及LCD显示器实现一个简单的水平仪应用。水平仪应用通过一个滚动的小球或气泡,来显示当前板子的倾斜度,当板子处于水平位置的时候,小球停在屏幕的正中间,倾斜板子,小球偏移,并能够显示偏移的角度(二维信息)。
2
项目需求
完成对MMA7660FC姿态传感器的数据采集。
完成对MMA7660FC姿态传感器采集到的数据的分析与倾角的计算。
实现对ST7789LCD屏幕的驱动。
将每一时刻的倾角体现为“气泡”与“液体”相对位置,在屏幕上的具体位置(圆盘和导管)绘制气泡,并发送到屏幕上,并把倾角的角度值显示到屏幕上。
3
设计思路
1. 程序流程图

2. 建立一个模块命名为GOS.py(Game kit Operating System),简单地封装对于硬件资源的直接调用。GOS.py模块下包含三个类的定义,分别为Control,Display,Gesture。其中Control类中包含了对于按钮和遥感状态的抽象,在水平仪的应用中用到得不多,故不在此具体描述。
3. Display类封装了初始化屏幕的代码以及一个名为UI的内部类。初始化代码包含了一个简单的开机动画(仅仅是显示了自己的id)。UI类定义了显示在屏幕上的部件的位置和尺寸信息,考虑到计算的复杂性,并未存储buffer信息。新的UI部件可以直接通过继承UI类来获取相应的位置和尺寸信息。
4. Gesture类封装了姿态传感器的初始化代码以及读取三轴倾角值的函数,函数的角度支持弧度制以及角度值。通过封装可以在调用的时候不过多地考虑底层实现的细节。
main.py模块包含对于水平仪应用(app)的导入,这么设计是为了考虑到将来对于应用的可拓展性(支持多个应用)。
5. 水平仪应用GOS_App_spirit_level.py是水平仪具体是实现的文件。其中包括:
对于硬件的初始化,包括屏幕,控制器(按钮和摇杆)以及姿态传感器。
Container继承于Display.UI,包含了一块内存空间作为buffer,用于存储每一时刻的气泡和容器的位置,可以通过显示函数发送到屏幕。4
硬件介绍
5
功能实现
1. 普通水平状态,气泡基本在正中间,略微有点偏移可能是因为桌面或者系统误差
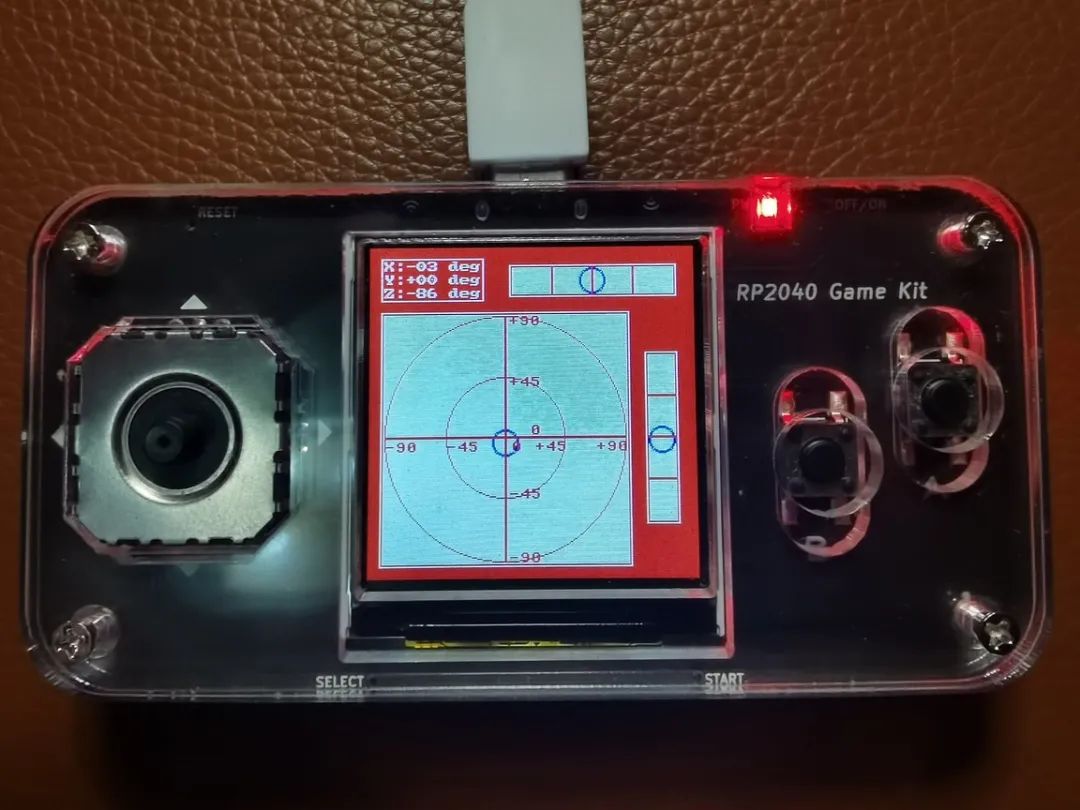
2. 左上角显示的是三轴角度信息,只需要关注前两个数据
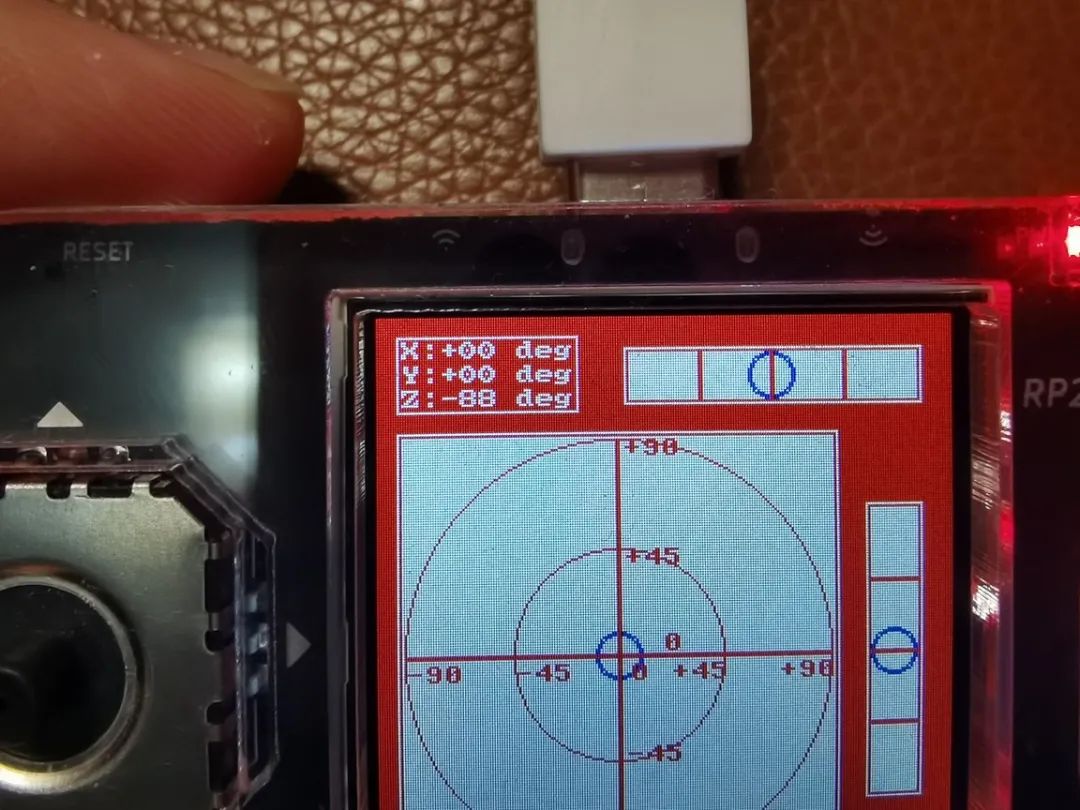
3. 任意角度可以正常偏移气泡

4. 极限位置,气泡在圆周内

6
主要代码片段及说明
这里我将用代码与注释的方式进行说明
1. Display类的定义
class Display:'''用于驱动屏幕以及提供组件的基类'''def __init__(self):'''初始化,定义SPI'''spi = SPI(0, baudrate=40_000_000, polarity=1, phase=1,sck=Pin(2, Pin.OUT),mosi=Pin(3, Pin.OUT))self.screen = st7789c.ST7789(spi, 240, 240,reset=Pin(0, Pin.OUT),dc=Pin(1, Pin.OUT),rotation=0)self.screen.init()def setup(self):'''显示开机图像'''self.screen.fill(st7789c.BLACK)self.screen.text(font2, "Powered By", 10, 10)self.screen.text(font2, "Godalin", 10, 50)utime.sleep(5)class UI:'''组件的基类,提供位置与尺寸的信息'''def __init__(self, x, y, w, h):self.x = xself.y = yself.w = wself.h = h@propertydef position(self):return (self.x, self.y, self.w, self.h)@propertydef center(self):return (self.x + self.w // 2, self.y + self.h // 2)
2. Gesture类的定义
class Gesture():'''用于包装姿态传感器'''def __init__(self):self.sensor = mma7660fc.MMA7660FC()def angles_h(self, mode="rad"):'''用于获取角度,可选角度数或者弧度数将重力加速度在三轴的分量转化计算出三个轴的倾角'''Ax, Ay, Az = self.sensor.read_accl()tx = math.atan2(Ax, math.sqrt(Ay * Ay + Az * Az))ty = math.atan2(Ay, math.sqrt(Ax * Ax + Az * Az))tz = math.atan2(Az, math.sqrt(Ax * Ax + Ay * Ay))if mode == "rad":return tx, ty, tzelif mode == "degree":tx = tx / math.pi * 180ty = ty / math.pi * 180tz = tz / math.pi * 180return tx, ty, tz
3. App模块主循环
while True:# 获取一次倾角测量tx_t, ty_t, tz_t = gest.angles_h()# 进行滑动平均tx = avg(tx, tx_t, beta)ty = avg(ty, ty_t, beta)tz = avg(tz, tz_t, beta)# 计算一些值,用于计算气泡的位置pos_x = 1 - math.sin(ty)pos_y = 1 - math.sin(tx)# 显示角度文字的更新disp.text(font1, "X:{:+03d} deg".format(int(tx / math.pi * 180)),10, 10, st7789.WHITE, st7789.RED)disp.text(font1, "Y:{:+03d} deg".format(int(ty / math.pi * 180)),10, 20, st7789.WHITE, st7789.RED)disp.text(font1, "Z:{:+03d} deg".format(int(tz / math.pi * 180)),10, 30, st7789.WHITE, st7789.RED)# 先绘制气泡再进行刻度和文字的绘制,形成文字在玻璃上,气泡在下方的效果# 气泡位置的更新rail1.update(bubble, int(50 * pos_x), 0)rail2.update(bubble, 0, int(50 * pos_y))plate.update(bubble, int(80 * pos_x), int(80 * pos_y))# 绘制圆形刻度线以及水平垂直刻度线rail1.buffer.fill_rect(29, 0, 2, 20, red)rail1.buffer.fill_rect(59, 0, 2, 20, red)rail1.buffer.fill_rect(89, 0, 2, 20, red)rail2.buffer.fill_rect(0, 29, 20, 2, red)rail2.buffer.fill_rect(0, 59, 20, 2, red)rail2.buffer.fill_rect(0, 89, 20, 2, red)circle(plate.buffer, 1, 1, 178, red)circle(plate.buffer, 46, 46, 88, red)plate.buffer.fill_rect(89, 1, 2, 178, red)plate.buffer.fill_rect(1, 89, 178, 2, red)# 书写文字刻度for s, ly, lx in zip(scales, loc_y, loc_x):plate.buffer.text(s, 92, ly, red)plate.buffer.text(s, lx, 93, red)# 将三部分含气泡的部分发送给屏幕disp.blit_buffer(rail1.buffer, *rail1.position)disp.blit_buffer(rail2.buffer, *rail2.position)disp.blit_buffer(plate.buffer, *plate.position)# 延时utime.sleep_ms(10)
7
遇到的主要难题及解决方法
1. MicroPython脚本版本的屏幕驱动库性能较低,无法实现流畅的屏幕刷新。
解决方法:使用交流群中老师提供的MicroPython固件,其中包含了用C语言写的st7789c拓展库,使用这个库可以实现高速刷屏,流畅程度很高,肉眼看不出刷屏的时间间隙。
2. 标准图形库framebuf使用color565编码的颜色(由LCD屏幕提供)无法正常显示,蓝色0x001f被显示为浅绿色,红色0xf800被显示为蓝色。
解决方法:查找st7789c的源代码仓库,发现其中的一条issue:指出FrameBuffer类使用的数据编码是little endian,小端,而屏幕的blit_buffer方法使用的是big endian,大端,两种颜色的编码相反,所以显示异常。该issue提供了下面的函数以供进行大小端的转换:
# 颜色编码转换def swap_rgb565(color):color = int.from_bytes(color.to_bytes(2, 'little'), 'big', False)return color
3. 由于想做美观的水平仪UI,需要用到圆形的绘制,而st7789c库以及framebuf标准库中并未提供相应的方法进行圆形的绘制,故需要自己写一个快速的算法进行绘制圆形。
解决方法:通过网络查找,找到一个名为中点圆的算法很符合需求,而且很快速。大致的原理是,只需要计算八分之一的圆所需要的像素,利用对称性每次绘制八个点来画圆。原帖的算法指定了圆心和半径的大小,而我修改算法,改为指定直径以及圆外接正方形的左上顶点坐标来绘制圆形,以实现对于任意直径的支持。代码保存在cirle.py模块中,具体如下:
# 中点圆算法def circle(display, x0, y0, d, color):r = d >> 1xc = x0 + ryc = y0 + rif d == r << 1:r -= 1d = 3 - (r << 1)def circle_plot(x, y):display.pixel(xc + x, yc + y, color)display.pixel(xc + x, yc - y - 1, color)display.pixel(xc - x - 1, yc + y, color)display.pixel(xc - x - 1, yc - y - 1, color)display.pixel(xc + y, yc + x, color)display.pixel(xc + y, yc - x - 1, color)display.pixel(xc - y - 1, yc + x, color)display.pixel(xc - y - 1, yc - x - 1, color)else:def circle_plot(x, y):display.pixel(xc + x, yc + y, color)display.pixel(xc + x, yc - y, color)display.pixel(xc - x, yc + y, color)display.pixel(xc - x, yc - y, color)display.pixel(xc + y, yc + x, color)display.pixel(xc + y, yc - x, color)display.pixel(xc - y, yc + x, color)display.pixel(xc - y, yc - x, color)xi = 0yi = rwhile True:circle_plot(xi, yi)if d < 0:d = d + (xi << 2) + 6else:d = d + (xi - yi << 2) + 10yi -= 1xi += 1if xi > yi:break
4. 由于姿态传感器的噪声,并不能在摆弄的时候形成平稳的动画。
解决方案:采用的滑动平均值进行滤波:
# 滑动平均值函数def avg(avg, this, beta):return avg * (1 - beta) + this * beta
其中avg是第上次迭代获取的平均值,返回值是新的平均值作为需要的输出,this是本次迭代的观测值。可以取avg=0作为初始值。程序中我采用beta=0.2,获得不错的效果,并且得益于取平均值的过程,模拟出了真实世界的惯性效果。
8
未来的计划或建议
MicroPython提供的工具编译为mpy文件,即原生字节码以提高效率。目前这个技术我只了解了一点点,并没有很好地掌握。或者直接使用Pico C SDK进行开发,提高性能。目前Pico C SDK开发在朋友的帮助下克服了flash空间大小的限制,实现了Bad Apple!!的播放,后续可以上传到视频网站。END
硬禾学堂
硬禾团队一直致力于给电子工程师和相关专业的同学,带来规范的核心技能课程,帮助大家在学习和工作的各个阶段,都能有效地提升自己的职业能力。

硬禾学堂
我们一起在电子领域探索前进
关注硬禾公众号,随时直达课堂

点击阅读原文下载代码
