

关注+星标公众号,不错过精彩内容

转自 | 小麦大叔
之前有不少读者在问关于Modbus协议相关的问题,今天给大家分享一篇由小麦大叔整理的Modbus协议教程。
介绍modbus rtu之前,我们可以了解到,Modbus是施耐德电气公司,于1979年发明的,是全球第一个真正用于工业现场的总线协议。四十多年过去了,现在仍然被广泛使用在各个工业控制领域。除了这个协议很稳定的原因之外:
modbus 是OSI模型第七层上的应用层报文传输协议,OSI定义了开放系统的层次结构、层次之间的相互关系以及各层所包括的可能的任务,作为一个框架来协调和组织各层所提供的服务。
OSI参考模型并没有提供一个可以实现的方法,而是描述了一些概念,用来协调进程间通信标准的制定。即OSI参考模型并不是一个标准,而是一个在制定标准时所使用的概念性框架。
modbus在OSI模型中,可以描述为下图;
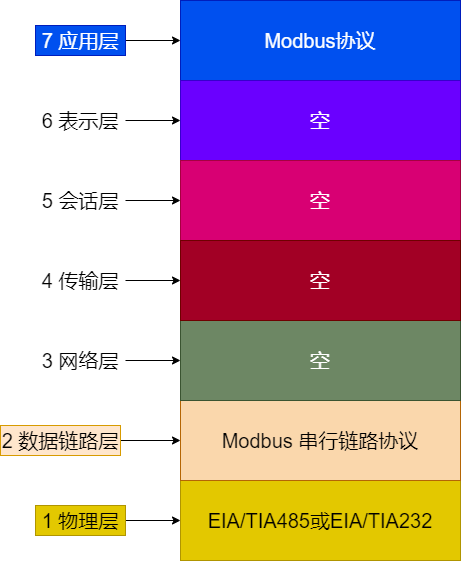
EIA485/TIA485就是RS485,随着技术不断发展,485标准目前是电信行业协会(TIA)维护,所以名称为TIA-485,当然工程师及应用指南仍继续用RS-485来称呼也是没问题的;
下面我们来介绍一些串行链路协议。
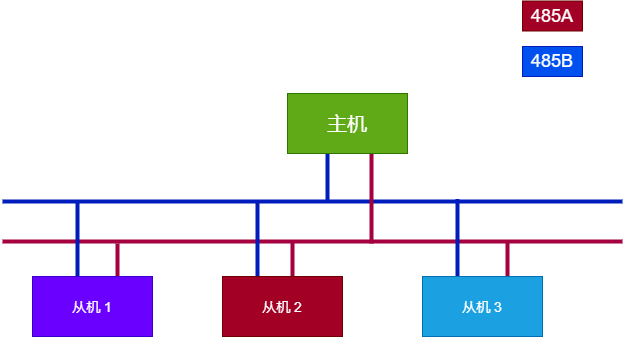
Modbus串行链路协议是一个主从模式(主机和从机),半双工的数据传输协议,485标准通常需要两条线,在某一个确定时刻,有一个主机和从机进行通讯。
整体的结构图如下所示;
这里我们还要明确几点:
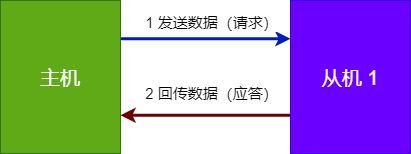
正如前面所提到的,modbus是半双工传输的,即主机发送数据的时候,是不能接收数据的,所以这里总共分为两步来进行。
主机发送数据的方式有两种,一个是 1对1,一个是1对多,也就是我们常说的广播形式,所有从机都可以收到主机发送的数据;
1对1 只需要发送数据给特定地址的从机即可,广播只需要把发送地址设置为0即可,所以广播地址为0;
这里我们已经大致了解了主机和从机之间的数据传输的情况,下面我们就再来介绍一下数据传输的具体格式;
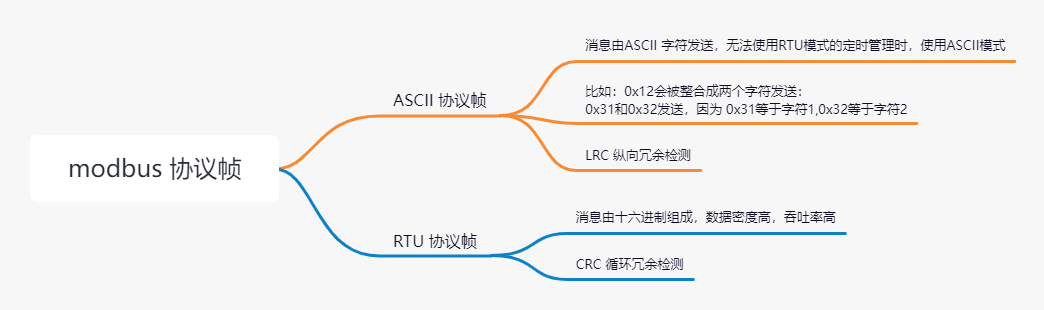
先来说说Modbus有两种传输模式,RTU传输模式和ASCII传输模式;
RTU传输:Remote Terminal Unit模式在Modbus中消息由十六进制组成,数据密度高,吞吐率高;
ASCII传输:消息由ASCII 字符发送效率不及RTU模式,无法使用RTU模式的定时管理时,使用ASCII模式;
比如:
0x12会被整合成两个字符发送:0x31和0x32发送,因为
0x31等于字符1;0x32等于字符2
下面我们会主要介绍modbus RTU。
在讲帧格式之前,首先我们想象一下,人与人之间的对话,最基本单元是汉字,然后相互交流就用汉字组成的句子,比如下面的对话;
所以机器之间的通信也是类似的,我们可以把字节当作最基本的数据单元,然后由字节组成句子,也就是通信帧;
但是现在情况出现了变化,对话的人里,除了小樟,还有一个小红,这时候,为了明确和谁说话,就需要在对话前面加上名字:
所以我们继续回到modbus的数据帧格式,这里的协议定义了一个基础通信层的简单协议数据单元(PDU),具体如下图所示;
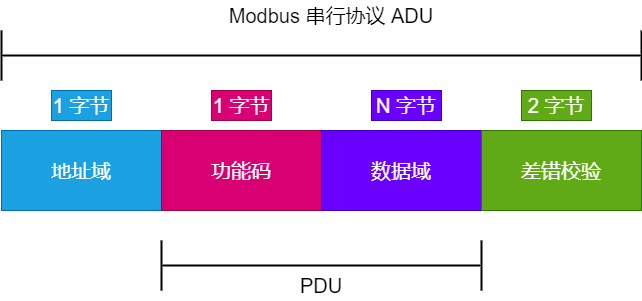
所以这里基本分为四个部分,地址域,功能码,数据,差错校验(CRC/LRC),统称为ADU (Application Data Unit),基本上进行传输的数据都要满足这个格式,作为一个完整的帧,对照前面老板的对话内容,我们这里可以简单的理解一下:
下面我们再深入分析一下;
Modbus PDU(protocol data unit)格式被定义为一个功能代码,后面跟着一组关联的数据。
该数据的大小和内容由功能代码定义,整个PDU(功能代码和数据)的大小不能超过253个字节。
每个功能代码都有一个特定的行为,从设备可以根据所需的应用程序行为灵活地实现这些行为。
PDU规范定义了数据访问和操作的核心概念;但是,从设备可能会以规范中未明确定义的方式处理数据。
地址域占用一个字节,所以一般来说寻址范围是0~255,一般在系统中用1~147,其他地址暂时保留,另外,同一个总线上的从机,每个地址必须唯一。
其中0是广播地址;
下面是Freemodbus的一个从机初始化代码,0x02就是这个从机的地址,
eMBInit(MB_RTU, 0x02, 3, 115200, MB_PAR_NONE);
功能码占一个字节,所以范围是 0~255,协议中规定了功能码分为三类:公共功能码,用户自定义功能码,保留功能码。整体如下所示;
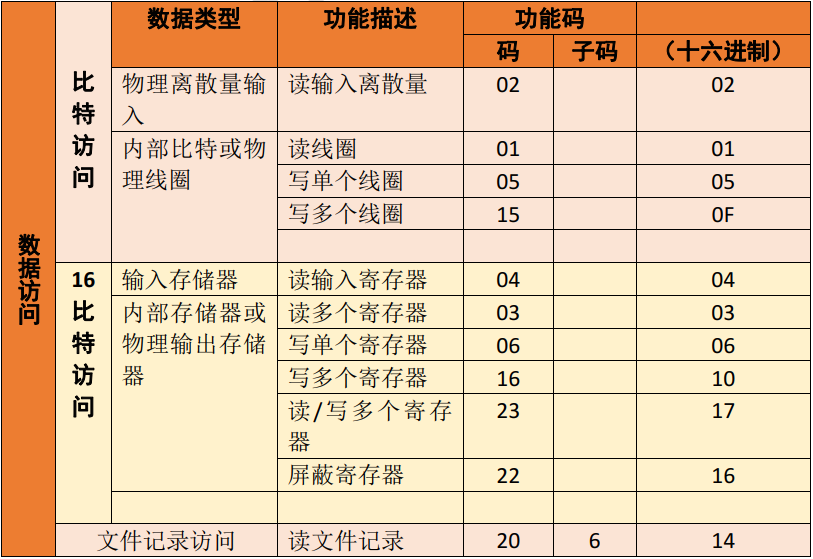
公共功能码必须保证它的唯一性,这是由Modbus组织已经规定好,并且具有一致性测试的功能码,所以在一定程度上,它保证了协议的可复用性。
由上表可知,公共功能码分为四种,分别是:
bit;bit;下面是移植Freemodbus协议,从机上需要对这四个公共功能码处理的回调函数:
//输入寄存器量
eMBErrorCode eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
return eStatus;
}
//保持寄存器量
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs,
eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
return eStatus;
}
//线圈数量
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils,
eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
return eStatus;
}
//离散输入数量
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
eMBErrorCode eStatus = MB_ENOERR;
return eStatus;
}
我们先看一下最底层modbus数据是如何发送的,没错,看到RS485和232,那我们自然想到了串口。
所以最根本的数据格式可以参考一下串口数据的定义,也就是我们说的起始位,数据位,校验位,数据位;具体如下所示;
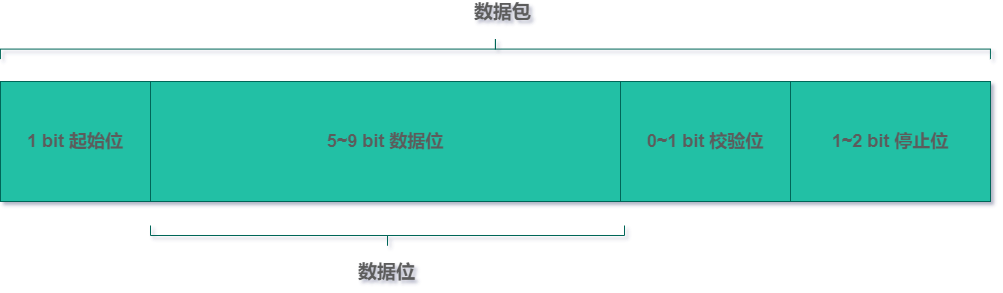
所以这里我们可以规定一下:
起始位+数据位+校验位(可选)+ 停止位 等于一个字符;因此这里可以通过串口的波特率去计算出单个字符所需要的时间。
然后我们再看一下,modbus帧是如何发送的?
在RTU模式中,帧之间的间隔至少为3.5个字符的空闲时间间隔,以便于表示帧的开始和帧的结束,所以如果想自己整一个modbus rtu就需要一个定时器去结算空闲时间的长度。
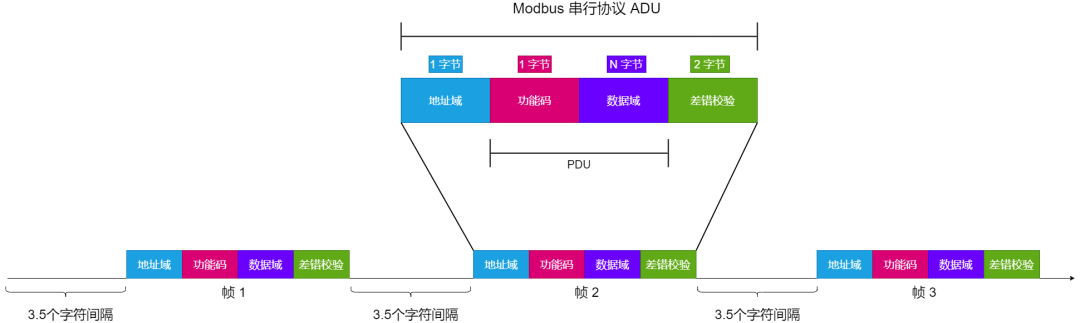
整个数据必须以连续的字符流进行发送,如果两个字符之间的长度等于1.5个字符时间,则认为帧消息不完整,则认为设备不该接收该消息,具体如下所示;

这里需要注意的是RTU需要定时器中断的参与,所以,1.5字符时间和3.5字符时间的检测,在串口通讯速率很高的时候,需要高频率得进入中断,这就会增加系统开销。
所以通常在波特率低于19200的时候,可以严格遵守1.5和3.5字符时间的规定。
如果波特率大于19200的时候,需要满足两个固定时间即可:
本文简单介绍了modbus rtu协议,包括串行链路通信,帧格式以及硬件链路层的消息格式,能力有限,本文难免存在错误和纰漏,请不吝赐教。篇幅有限本文先到这里,下一篇介绍一下如何移植Freemodbus协议以及调试协议的过程。
如何本文帮到了您,请帮忙点赞鼓励一下。


点击“阅读原文”查看更多分享。
