
来源 | 雷达信号处理matlab
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
声明 | 本号聚焦相关知识分享,内容观点不代表本号立场,可追溯内容均注明来源,若存在版权等问题,请联系(15881101905,微信同号)删除,谢谢。
雷达的基本任务是发现目标并对目标进行定位。通常目标的回波信号中总是混杂着噪声和干扰,而噪声和各种干扰信号均具有随机特性,在这种条件下发现目标的问题属于信号检测的范畴,而测定目标坐标则是参数估计问题。
信号检测是参数估计的前提,只有发现了目标才能对目标进行定位。因此,信号检测是雷达最基本的任务。
信号检测就是对接收机输出的由信号、噪声和其它干扰组成的混合信号经过信号处理以后,以规定的检测概率(通常比较高)输出所希望得到的有用信号,而噪声和其它干扰则以低概率产生随机虚警(通常以一定的虚警概率为条件)。
检测概率和虚警概率取决于噪声和其它干扰信号,以及伴随这些信号的目标信号的幅度分布(概率密度函数),因此,检测是一个统计过程。
釆用何种方式来处理信号和噪声(或包括干扰)的混合波形,以便最有效地利用信号所载信息使检测性能最好,这是理论上需要解决的问题。信号检测理论就是判断信号是否存在的方法及其最佳处理方式。
基本检测过程
检测系统的任务是对输入进行必要的处理,然后根据一定的准则来判断输入是否有信号,如下图所示。输入到检测系统的信号
①信号加噪声,即
②只有噪声,即
由于输入噪声和干扰的随机性,信号检测问题要用数理统计的方法来解决。

雷达的检测过程可以用门限检测来描述,即将接收机的接收信号经信号处理后的输出信号(检测前输入信号)与某个门限电平进行比较。
如果检测前输入信号的包络超过了某一预置门限,就认为有目标(信号)。雷达信号检测属于二元检测问题,即要么有目标,要么无目标。
当接收机只有噪声输入时,为

二元检测问题实际上是对观察信号空间

对于二元检测来说,有两种正确的判决和两种错误的判决如下表所示。
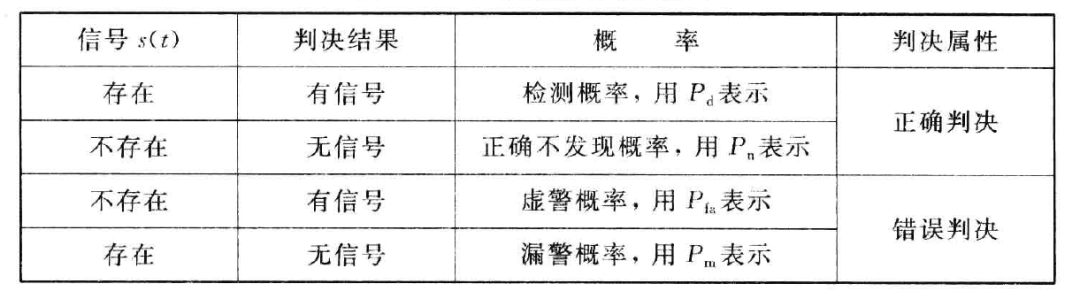
这些判决的概率可以用条件概率表示为
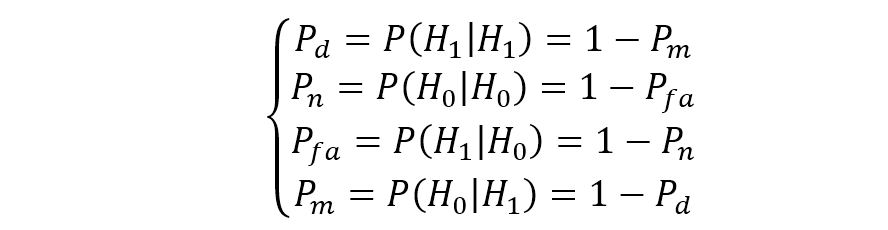
式中
假设
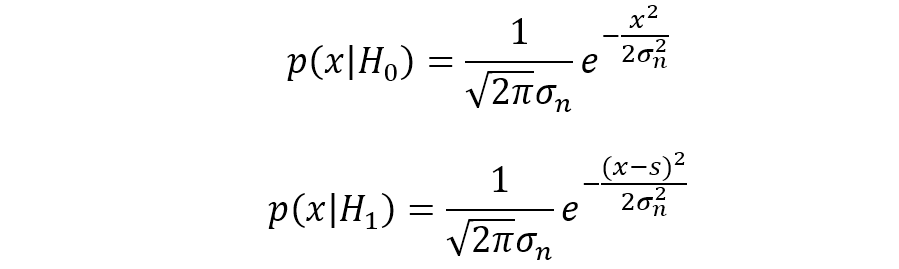
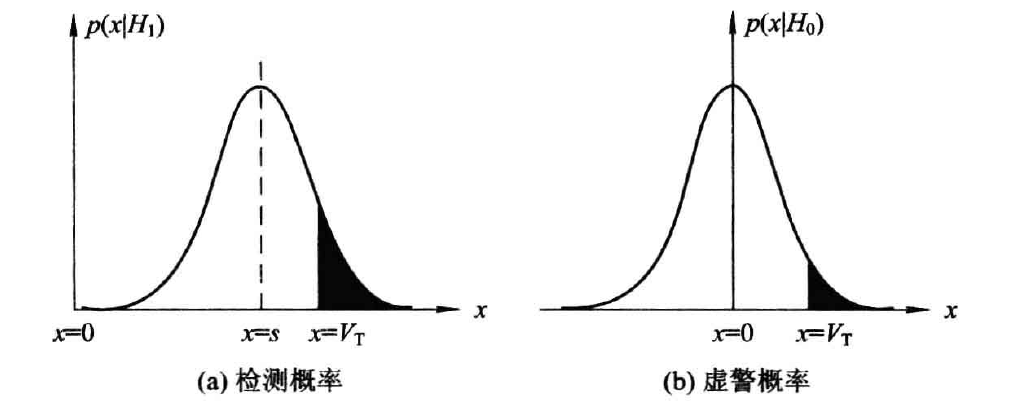
则虚警概率
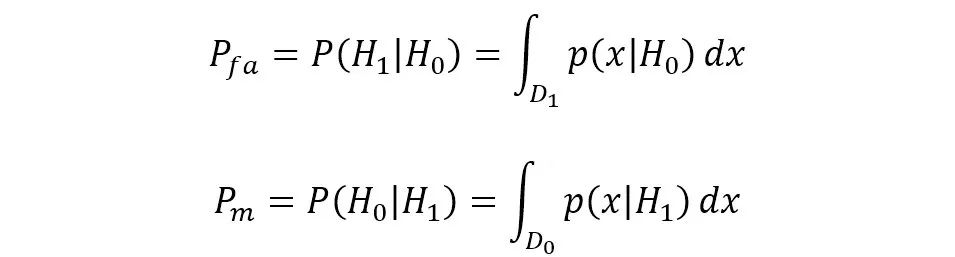
假定判决门限为
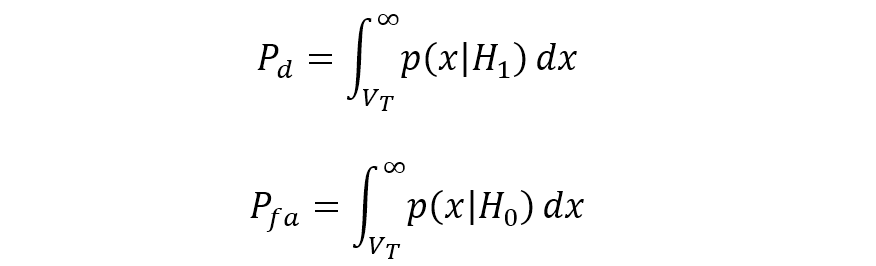
检测概率和虚警概率分别用下图中的阴影面积来表示。
判决门限的确定与采用的最佳准则有关。在信号检测中常用的最佳准则有:
贝叶斯准则
最小错误概率准则
最大后验概率准则(要求后验概率
极小极大化准则
奈曼—皮尔逊(Neyman-Pearson)准则
在雷达信号检测中,因预先并不知道目标出现的概率,也很难确定一次漏警所造成的损失,所以,通常釆用的准则是在一定的虚警概率下,使漏警概率最小或使正确检测概率达到最大,这就是奈曼—皮尔逊准则。
在数学上,奈曼—皮尔逊准则可表示为:在

式中:
为了提高判决的质量,减小噪声干扰随机性的影响,一般需要对接收信号进行多次观测或多次取样。例如,对于

当输入为
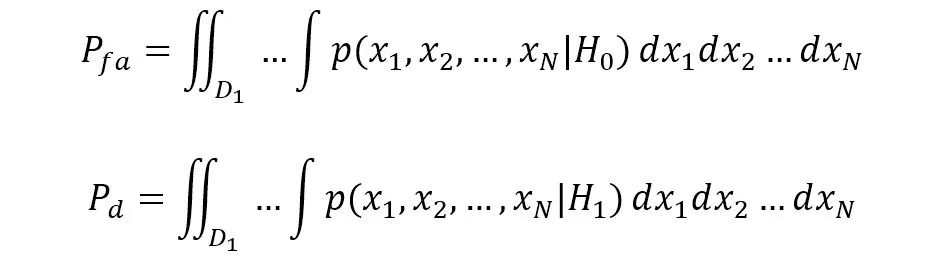
则可得总错误概率与联合概率分布密度函数的关系为

观察空间的划分应保证总错误概率

的所有点均划在

的所有点划在
上式可改写为

定义有信号时的概率密度函数和只有噪声时的概率密度函数之比为似然比

似然比
信号的最佳检测系统(最佳接收系统)是由一个似然比计算器和一个门限判决器组成,如下图所示。这里所说的最佳准则是总错误概率最小,或者说在固定虚警概率条件下使检测概率最大。可以证明,在不同的最佳准则下,上述检测系统都是最佳的,差别仅在于门限的取值不同。

- The End -
版权声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系删除。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!
