帖子
帖子
博文
电子工程专辑
电子技术设计
国际电子商情
资料
白皮书
研讨会
芯语
文库
一文厘清车载毫米波雷达
智驾最前沿
2022-03-02 08:00
示波器的最低带宽多少?
芯片现货市场行情分析
-
-后台
回复“
资料
”,领取特斯拉专利技术解析报告--
首先给大家介绍车载毫米波雷达基本概念。重点从通俗易懂的角度向大家介绍毫米波雷达基本原理、最大探测距离和距离分辨率、最大测速范围和速度分辨率、最大测角范围和角度分辨率。
毫米波雷达原理
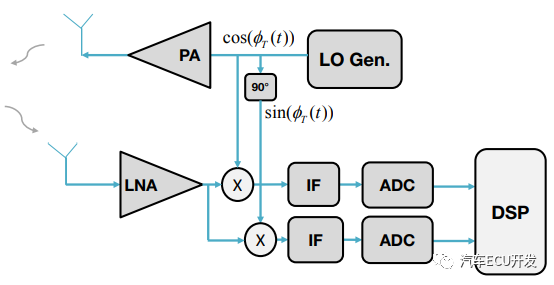
毫米波雷达利用发射信号和接收信号之间的频率差来进行测距、测速,利用天线阵元之间的相 位差来进行测角。毫米波雷达系统框图如下图所示:
图1 毫米波雷达系统框图
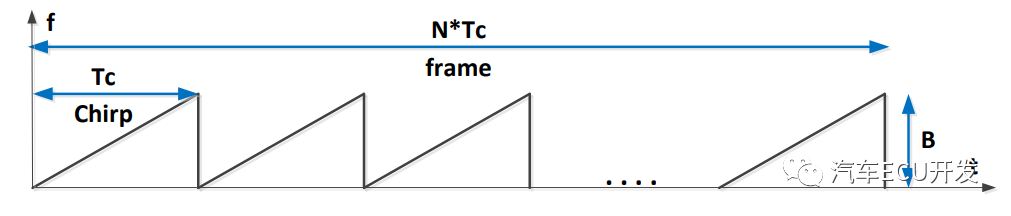
(1)毫米波雷达首先通过信号发生器(图中LO Gen.)产生我们所需要的雷达信号波形,如现在常用的快速锯齿波或者叫线性调频连续波(FMCW),这时被产生的信号还是基带信号,不能够直接发射出去,还需要多级变频调制处理,将产生的雷达波形信号调制到76GHz~77GHz之间,经过放大器(PA)放大之后,再经发射天线(TX)辐射到空间中去。目前77GHz常用的FMCW波形示意图如下图所示:
图2 FMCW雷达波形示意图
实际雷达工作波形并没有图2这么理想,真正的雷达工作波形将在后面贴上。毫米波雷达在一个工作周期内或者一帧内(简称一个Frame)发射一连串的FMCW信号,一个FMCW就是一个Chirp。如图2所示,一个Frame由N个Chirp组成。
(2)由发射天线辐射的雷达信号照射到空间目标之后,再反射到雷达处,被接收天线(RX)接收,经过低噪声放大(LNA)之后,与参考信号(即雷达发射信号)进行混频,得到复基带信号(I路信号和Q路信号)。经低通滤波之后,通过ADC采样得到离散的复基带信号。车载雷达RF模块与军用雷达由3大不同,首先,车载雷达RF模块现在高度集成化的,集成在一个RF芯片上,而军用雷达的RF是由多个分离式的单元组成;其次,车载雷达为了降低成本,采用的是模拟混频和模拟低通滤波,直接得到基带信号,而军用雷达是采用数字混频和数字带通滤波,得到的是带有一定载频的中频信号,然后采用高速ADC进行采样得到数字中频信号;第三,在混频部分,目前除TI采用I/Q正交混频外,英飞凌和NXP为了降成本,采用的是I单路混频,如图3所示。军用雷达目前普遍采用I/Q正交混频。所以英飞凌和NXP这两家的基带信号强度要比TI的低3dB,但是省掉Q路的混频硬件模块和对应的ADC。
图3 只有I路混频的雷达系统结构图
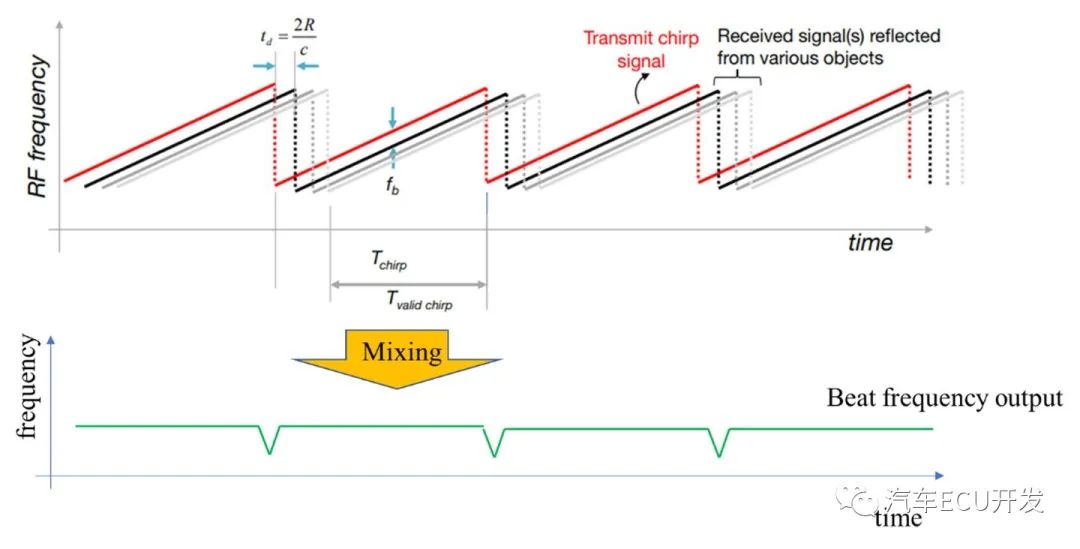
发射信号和接收信号的混频如下图所示:
图4 单目标情况下的混频结果示意图
从图4可见,对单个目标而言,混频后得到的基带信号是一个频率固定的近似正弦信号。当存在多个目标情况下,基带信号将是多个不同频率的正弦信号的叠加。
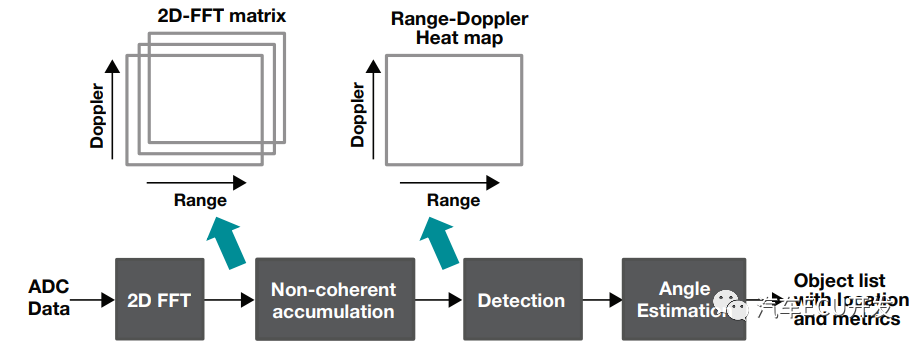
(3) ADC采样后的数字信号在DSP中完成相应的信号处理。雷达信号处理流程如图5所示:
图5 雷达信号处理链路流程图
信号处理的具体步骤包括:
1)2D-FFT:首先对每个RX通道的每个Frame内的数据进行2D-FFT处理(R-D处理),得到每个通道的距离-多普勒谱。这个2D-FFT谱是一个复数结果,不能直接进行目标位置和速度信息的提取。因此,我们要进行非相干积累处理。
2)非相干积累:即对每个通道对应的2D-FFT结果取模平方值,然后所有通道的2D-FFT取模平方结果的对应位置求和后平均,得到一张合成后的R-D谱。这就完成了非相干积累处理。合成的R-D谱上的每一个峰值代表一个可能的目标或干扰。非相干积累的目标有2个:首先,是提高信噪比,提高检测精度;其次,平滑噪声,降低CFAR阶段的误检率。
3)CFAR检测:根据非相干积累结果进行恒虚警检测,得到这一帧内所有可能的目标。所有被检测出来的目标并不一定都是真实目标,有可能是很强的杂波干扰。被检测出来的干扰目标可以在目标跟踪阶段进行滤除。根据CFAR检测的可能目标在R-D谱上的对应位置,可以计算出目标的距离和速度信息。
4)角度估计:CFAR完成后虽然得到了每个可能目标的位置和速度信息,但是还没有得到目标的角度信息。为得到每个目标的角度信息,需要利用每个目标在所有接收通道上的对应R-D谱位置上的数据,通过DBF或者空间谱估计方法尽心角度估计,进而得到目标角度信息。
上述步骤完成了对每个目标的距离、速度和角度信息的计算,利用这些信息可以进行聚类和跟踪等处理,进一步得到目标的轨迹信息以及尺寸和类型信息。
接下来为大家介绍一些雷达威力范围和性能指标的计算和评估方法。
雷达威力范围和性能指标
雷达最大探测距离
雷达工作参数决定了雷达最大探测距离,有两种方法可以分析和计算雷达最大探测距离:基于雷达方程的方法和基于雷达调频斜率的方法。首先我们介绍基于雷达方程的最大探测距离估计方法。
假定雷达通过天线往球面空间均匀辐射能量,发射天线功率为 Pt,发射天线增益为 Gt ,那么距离处雷达辐射的功率密度为:
pt=(PtGt)/(4πR²)
在距离 R 处,雷达辐射的部分能量被目标截获,假定目标散射截面积(RCS)为σ,那么被目标截获的功率为
Pσ=σ*pt=(PtGtσ)/(4πR²)
这部分能量又辐射到空间任意方向上去,重新辐射到雷达天线处的功率密度为:
Pr=Pσ/(4πR²)=((PtGtσ)/(4πR²))*(1/4πR²)
此时,有部分能量被雷达接收天线接收,假定雷达接收天线的接受面积为 Ae,那么雷达天线接收的信号功率为:
Pr=Ae*pr=((PtGtσ)/(4πR²))*(Ae/4πR²)
假定雷达接收机灵敏度(最小可检测信号)为 Smin,那么当 Pr=Smin 时,对应的雷达探测距离R就是雷达的最大可探测距离:
Smin=Pr=((PtGtσ)/(4πR²))*(Ae/4πR²)
即
从上面推导可见,最大探测距离不仅与发射功率和发射天线增益有关,还与目标 RCS和接收机灵敏度有关。目标RCS是个很玄的东西,到现在业内都没人说清RCS是怎么回事,它的机理是什么。因为RCS因素的影响,显著增大了雷达最大探测距离评估的复杂度。因此,不确定因素太多,基于雷达方程来进行最大探测距离评估和计算不是最好的方法。
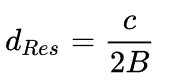
另一种最大探测距离计算方法比较简单,只与调频斜率和雷达RF的中频带宽。由于RF芯片由中频带宽限制,所以雷达发射和接收信号在混频后,RF芯片接收通道最大可接收的差频信号频率不超过中频带宽的最大值,所以车载雷达最大可探测距离可以表示为:
其中
为 IFmax RF芯片的最大中频带宽;
S为FMCW调制斜率;
c是光速。
因此,在车载雷达系统方案设计时,最大可探测距离可以用第二种方法来计算。
雷达距离分辨率
距离分辨率的概念是:在角度和速度相同的条件下,能够将两个目标区分开来的最小距离间隔。FMCW雷达信号处理中,通常用2D-FFT来进行距离-多普勒处理。所以我们从离散傅里叶变换角度推导距离分辨率如何计算。假定距离维处理时,每个Chirp的有效采样长度为Ta。那么进行傅里叶变换后,对应的频率分辨率为1/Ta 。因此,在距离维上可以区分两个目标的条件是,它们的频率间隔 △f 必须大于1/Ta ,即
又因为频率间隔△f与对应的距离间隔△d之间的关系为
由此可得
其中 B=S x Ta为有效带宽。
所以距离分辨率为
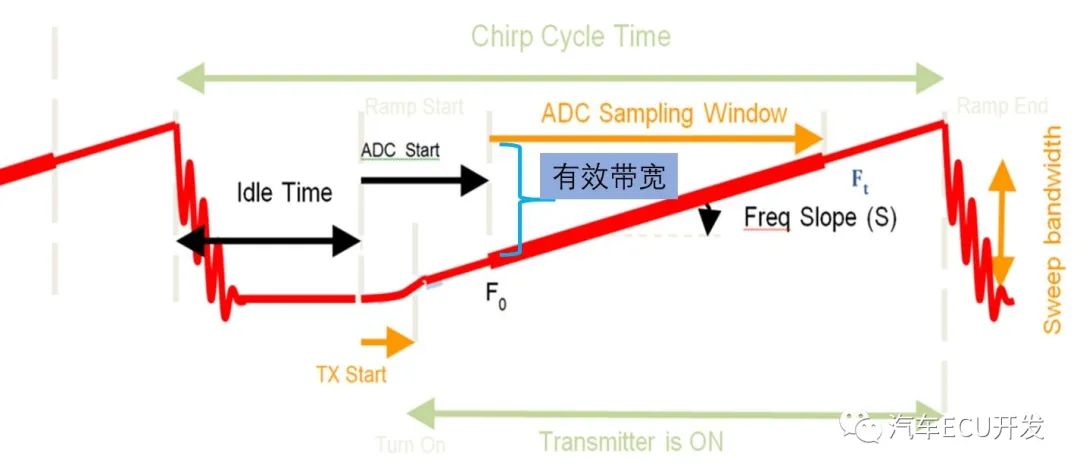
再次强调的是,B是有效带宽,即距离维上你实际采样点数所占时间长度所对应的调制带宽。不是你雷达工作时的整个雷达波形扫频带宽,因为在实际采样过程中,往往对每个Chirp周期内的数据掐头去尾,丢掉质量不好的起始端和末尾段数据,有效带宽往往小于雷达工作时的扫频带宽,如下图所示。
图6 雷达扫频带宽与实际有效带宽的关系
最大不模糊速度
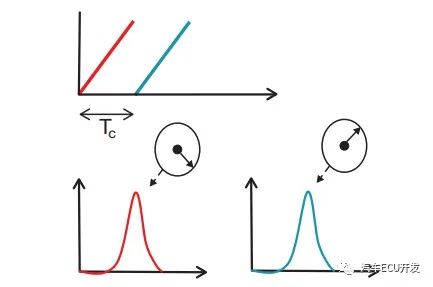
不模糊测速范围表示雷达的最大测速能力。假定雷达发射两个Chirp的FMCW信号,Tc为Chirp周期,如下图所示。
图7 两个Chirp的FMCW信号
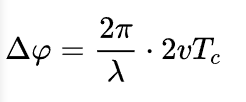
假定空间中只有一个目标,目标运动速度为,那么红色Chirp和蓝色Chirp之间因为速度引起的距离徙动为 2vTc ,之所以不是vTc,是因为雷达信号往返有双程差。因此,两个Chirp因为速度引起的相位差为
由此可得
通常△φ的绝对值小于π,因此,最大不模糊速度为
所以当Chirp周期为Tc时,雷达测速范围为 -vmax < v < vmax 。
速度分辨率
与距离分辨率相类似,速度分辨率表征区分两个不同速度目标的能力。因为求解目标目标速度时,是在慢时间维上进行FFT处理,FFT点数为一个Frame内的Chirp数目。假定一个Frame内的Chirp数为N,则速度分辨率为
最大测角范围与角度分辨率
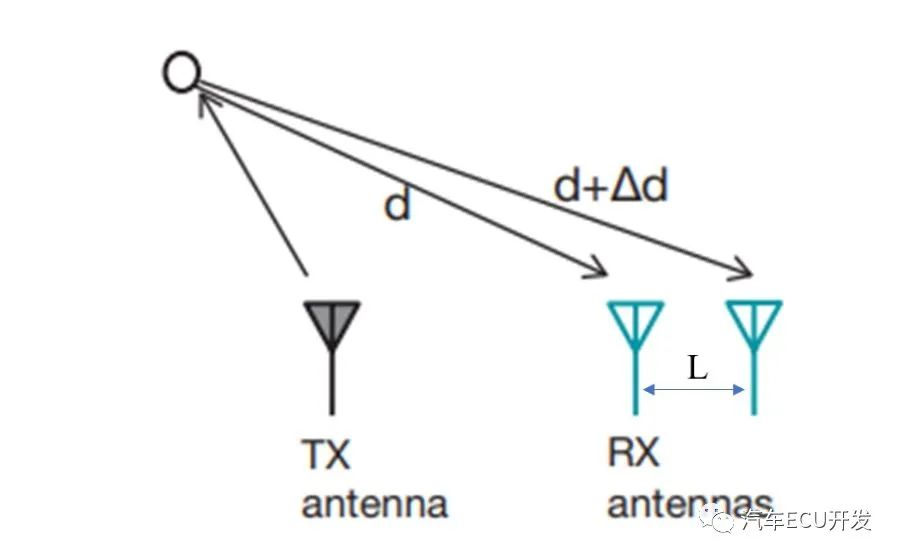
毫米波雷达的最大测角范围与雷达阵列的阵元间距有关。接收阵元接收空间反射回来的信号,相当于在空间维上进行空间采样。雷达天线阵列如下图所示:
图8 雷达天线阵列示意图
假定雷达接收天线阵元间距为L,在角度处有一个目标。那么对于该目标θ,相邻两个接收阵元之间的相位差为
其中△d=L*sin(θ) ,那么
由此推导得到
因此,当阵元间距等于半波长,即 L=λ/2时,对应的最大不模糊测角范围为 -π/2~+π/2 。
类似的,假定雷达接收阵元数目为
,那么角度分辨率为
其中,D为接收阵列天线孔径。
整理自汽车ECU开发,文
中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告
知,我们将及时处理。
-- END --
登录阅读全文
车载毫米波雷达
免责声明:
该内容由专栏作者授权发布或作者转载,目的在于传递更多信息,并不代表本网赞同其观点,本站亦不保证或承诺内容真实性等。若内容或图片侵犯您的权益,请及时联系本站删除。侵权投诉联系:
nick.zong@aspencore.com
!
智驾最前沿
「智驾最前沿」深耕自动驾驶领域技术、资讯等信息,解读行业现状、紧盯行业发展、挖掘行业前沿,致力于助力自动驾驶发展与落地!公众号:智驾最前沿
进入专栏
评论
芯语
帖子
文库
下载
博文
美国新任总统特朗普的“Stargate”(星际之门)是做啥的,用到哪些芯片呢
芯片工艺技术
2025-01-22
382浏览
突发!马斯克收购英特尔!
PCB资讯
2025-01-21
370浏览
广东可使用医保买华为智能手表引热议官方回应:符合使用范围
快科技
2025-01-21
339浏览
SK海力士绩效奖金提至18.7个月工资!
WitDisplay
2025-01-21
299浏览
曝某汽车品牌订单造假,已到暴雷边缘!
集成电路IC
2025-01-21
285浏览
真心希望你用不上这个:一张图搞懂离职补偿的N、N+1、2N
C语言与CPP编程
2025-01-22
278浏览
幻方梁文锋参加总理座谈会,谈了什么?
科创板日报
2025-01-21
271浏览
黄仁勋缺席特朗普就职典礼,在华称英伟达要继续和中国合作
芯通社
2025-01-21
203浏览
车灯FCC辐射超标如何解决
QWE4562009
2025-01-16
121浏览
我想下载一个dos文档,我也不知道内容。
时拯
2025-01-15
97浏览
电子背散射衍射晶体学织构分析与数据处理
金鉴实验室李工
2025-01-07
86浏览
padsVX使用问题20250111
QWE4562009
2025-01-11
415浏览
低电容ESD保护二极管 BV-FA05UCA
sales_263623713
2025-01-09
58浏览
AD19使用的两个问题
QWE4562009
2025-01-09
864浏览
altium Designer19使用问题20250115
QWE4562009
2025-01-15
521浏览
求助 请推荐一款8脚的DCDC , 12V 变5V的, 2A 就行,不虚标。
esad0
2025-01-06
1164浏览
放假前的三个问题,THX
QWE4562009
2025-01-20
85浏览
成立公司好还是一个做好?
curton
2025-01-12
456浏览
开关电源设计 反激控制思路的了解-4
所需E币: 0
2025-01-13 16:29
大小: 911.93KB
上传者:
厚德载物2025
基于单片机液晶显示万年历参考论文
所需E币: 5
2025-01-09 09:51
大小: 632.2KB
上传者:
木头1233
基于51单片机的万年历设计论文
所需E币: 5
2025-01-08 22:22
大小: 1.55MB
上传者:
木头1233
基于IC卡的楼宇门禁系统的设计论文
所需E币: 5
2025-01-09 09:47
大小: 92.46KB
上传者:
木头1233
电子元器件检测技能速成
所需E币: 0
2025-01-13 15:48
大小: 49.73MB
上传者:
厚德载物2025
基于单片机IC卡读卡器设计开题报告
所需E币: 5
2025-01-09 09:48
大小: 26.5KB
上传者:
木头1233
基于51单片机智能温控风扇系统开题报告
所需E币: 5
2025-01-08 22:24
大小: 36.26KB
上传者:
木头1233
基于单片机的洗衣机自动控制设计与实现
所需E币: 5
2025-01-09 09:50
大小: 354.96KB
上传者:
木头1233
基于单片机的洗衣机智能控制系统设计论文
所需E币: 5
2025-01-09 09:49
大小: 2.42MB
上传者:
木头1233
基于单片机的洗衣机控制系统设计
所需E币: 5
2025-01-09 09:48
大小: 1.26MB
上传者:
木头1233
PCB设计第058篇 如何打开IPC-2581格式的PCB加工文件
IPC-2581是基于ODB++标准、结合PCB行业特点而指定的PCB加工文件规范。 IPC-2581旨在替代CAM350格式,成为PCB加工行业的新的工业规范。 有一些免费软件,可以查看(不可修改)IPC-2581数据文件。这些软件典型用途是工艺校核。 1. Vu2581 出品:Downstream
电子知识打边炉
2025-01-22 11:12
55浏览
【工程师故事】+2024年总结之做技术不能想当然
2024年是很平淡的一年,能保住饭碗就是万幸了,公司业绩不好,跳槽又不敢跳,还有一个原因就是老板对我们这些员工还是很好的,碍于人情也不能在公司困难时去雪上加霜。在工作其间遇到的大问题没有,小问题还是有不少,这里就举一两个来说一下。第一个就是,先看下下面的这个封装,你能猜出它的引脚间距是多少吗?这种排线座比较常规的是0.6mm间距(即排线是0.3mm间距)的,而这个规格也是我们用得最多的,所以我们按惯性思维来看的话,就会认为这个座子就是0.6mm间距的,这样往往就不会去细看规格书了,所以这次的运气
wuliangu
2025-01-21 00:15
186浏览
过孔的设计孔径是真的很重要,但高速先生也是真的不关心
高速先生成员--黄刚这不马上就要过年了嘛,高速先生就不打算给大家上难度了,整一篇简单但很实用的文章给大伙瞧瞧好了。相信这个标题一出来,尤其对于PCB设计工程师来说,心就立马凉了半截。他们辛辛苦苦进行PCB的过孔设计,高速先生居然说设计多大的过孔他们不关心!另外估计这时候就跳出很多“挑刺”的粉丝了哈,因为翻看很多以往的文章,高速先生都表达了过孔孔径对高速性能的影响是很大的哦!咋滴,今天居然说孔径不关心了?别,别急哈,听高速先生在这篇文章中娓娓道来。首先还是要对各位设计工程师的设计表示肯定,毕竟像我
一博科技
2025-01-21 16:17
101浏览
挑战6万月薪【三】Purple Pi OH开发板带你7天入门OpenHarmony!
现在为止,我们已经完成了Purple Pi OH主板的串口调试和部分配件的连接,接下来,让我们趁热打铁,完成剩余配件的连接!注:配件连接前请断开主板所有供电,避免敏感电路损坏!1.1 耳机接口主板有一路OTMP 标准四节耳机座J6,具备进行音频输出及录音功能,接入耳机后声音将优先从耳机输出,如下图所示:1.21.2 相机接口MIPI CSI 接口如上图所示,支持OV5648 和OV8858 摄像头模组。接入摄像头模组后,使用系统相机软件打开相机拍照和录像,如下图所示:1.3 以太网接口主板有一路
Industio_触觉智能
2025-01-20 11:04
153浏览
聊聊RISC-V MCU技术
嘿,咱来聊聊RISC-V MCU技术哈。 这RISC-V MCU技术呢,简单来说就是基于一个叫RISC-V的指令集架构做出的微控制器技术。RISC-V这个啊,2010年的时候,是加州大学伯克利分校的研究团队弄出来的,目的就是想搞个新的、开放的指令集架构,能跟上现代计算的需要。到了2015年,专门成立了个RISC-V基金会,让这个架构更标准,也更好地推广开了。这几年啊,这个RISC-V的生态系统发展得可快了,好多公司和机构都加入了RISC-V International,还推出了不少RISC-V
丙丁先生
2025-01-21 12:10
112浏览
瑞芯微开发板/主板Android配置APK默认开启性能模式方法
本文介绍瑞芯微开发板/主板Android配置APK默认开启性能模式方法,开启性能模式后,APK的CPU使用优先级会有所提高。触觉智能RK3562开发板演示,搭载4核A53处理器,主频高达2.0GHz;内置独立1Tops算力NPU,可应用于物联网网关、平板电脑、智能家居、教育电子、工业显示与控制等行业。源码修改修改源码根目录下文件device/rockchip/rk3562/package_performance.xml并添加以下内容,注意"+"号为添加内容,"com.tencent.mm"为AP
Industio_触觉智能
2025-01-17 14:09
164浏览
电气系统中,如何选择一款最为适配的数字隔离芯片?
数字隔离芯片是一种实现电气隔离功能的集成电路,在工业自动化、汽车电子、光伏储能与电力通信等领域的电气系统中发挥着至关重要的作用。其不仅可令高、低压系统之间相互独立,提高低压系统的抗干扰能力,同时还可确保高、低压系统之间的安全交互,使系统稳定工作,并避免操作者遭受来自高压系统的电击伤害。典型数字隔离芯片的简化原理图值得一提的是,数字隔离芯片历经多年发展,其应用范围已十分广泛,凡涉及到在高、低压系统之间进行信号传输的场景中基本都需要应用到此种芯片。那么,电气工程师在进行电路设计时到底该如何评估选择一
华普微HOPERF
2025-01-20 16:50
73浏览
2025年刚开始,就收到了“橄榄枝”!
临近春节,各方社交及应酬也变得多起来了,甚至一月份就排满了各式约见。有的是关系好的专业朋友的周末“恳谈会”,基本是关于2025年经济预判的话题,以及如何稳定工作等话题;但更多的预约是来自几个客户老板及副总裁们的见面,他们为今年的经济预判与企业发展焦虑而来。在聊天过程中,我发现今年的聊天有个很有意思的“点”,挺多人尤其关心我到底是怎么成长成现在的多领域风格的,还能掌握一些经济趋势的分析能力,到底学过哪些专业、在企业管过哪些具体事情?单单就这个一个月内,我就重复了数次“为什么”,再辅以我上次写的:《
牛言喵语
2025-01-22 17:10
43浏览
人形机器人疯狂进厂打工!银河通用、智元、乐聚机器人怕是都疯了
万万没想到!科幻电影中的人形机器人,正在一步步走进我们人类的日常生活中来了。1月17日,乐聚将第100台全尺寸人形机器人交付北汽越野车,再次吹响了人形机器人疯狂进厂打工的号角。无独有尔,银河通用机器人作为一家成立不到两年时间的创业公司,在短短一年多时间内推出革命性的第一代产品Galbot G1,这是一款轮式、双臂、身体可折叠的人形机器人,得到了美团战投、经纬创投、IDG资本等众多投资方的认可。作为一家成立仅仅只有两年多时间的企业,智元机器人也把机器人从梦想带进了现实。2024年8月1
刘旷
2025-01-21 11:15
412浏览
Ubuntu20.04取消root账号自动登录方法触觉智能RK3568开发板演示
Ubuntu20.04默认情况下为root账号自动登录,本文介绍如何取消root账号自动登录,改为通过输入账号密码登录,使用触觉智能EVB3568鸿蒙开发板演示,搭载瑞芯微RK3568,四核A55处理器,主频2.0Ghz,1T算力NPU;支持OpenHarmony5.0及Linux、Android等操作系统,接口丰富,开发评估快人一步!添加新账号1、使用adduser命令来添加新用户,用户名以industio为例,系统会提示设置密码以及其他信息,您可以根据需要填写或跳过,命令如下:root@id
Industio_触觉智能
2025-01-17 14:14
122浏览
智驾最前沿
「智驾最前沿」深耕自动驾驶领域技术、资讯等信息,解读行业现状、紧盯行业发展、挖掘行业前沿,致力于助力自动驾驶发展与落地!公众号:智驾最前沿
文章:1960篇
粉丝:36人
私信
最近文章
深度解读华为智能汽车业务
端到端,自动驾驶的新引擎?
政策与技术并行,共推Robotaxi商业化进程?
“车路云一体化”系统方案,赋能智能网联汽车规模化落地?
即将过年,你的年终奖有多少?
热门文章
广告
推荐
示波器需要多少模拟通道?
入门级示波器调查
芯片现货市场行情分析
您在使用示波器时面临的最大挑战是什么?
在线研讨会
重塑机器人未来:揭秘创新芯片解决方案的颠覆力量
Allegro电流传感器替代采样电阻解决方案—实现更高效、更可靠的电流检测
如何在隔离的状态监控系统中捕获同步数据
多路有光·精准不凡——KSW-SGM01模拟信号源发布会
EE直播间
Fabless100系列技术和应用直播 —实时控制、BMS:国产MCU迈向高性能应用
直播时间:02月18日 10:00
高效协同与版本管理:Cliosoft助力现代芯片设计
直播时间:02月26日 10:00
第三代功率半导体器件测试解决方案
直播时间:03月06日 10:00
E聘热招职位
资料
文库
帖子
博文
1
电子元器件检测技能速成
2
ESP32TFT常用字体库.zip
3
静电学手册 21312321
4
无线传能充电器设计与实现论文
5
基于单片机自动电阻测试仪设计论文
6
开关电源设计 反激控制思路的了解-2
7
基于模式识别的手写汉字识别系统设计
8
sharp r69431 datasheet
9
开关电源设计 反激控制思路的了解-3
10
基于Labview的家居控制平台设计论文
1
桥式变换电路
2
求助 请推荐一款8脚的DCDC , 12V 变5V的, 2A 就行,不虚标。
3
【工程师故事】+2024年:资深嵌入式工程师在职读研的第一年,收获颇丰
4
〖思路〗 反偏PN结的 四种状态
5
altium Designer19使用问题20250115
6
助力新能源汽车电机控制SLM7888系列SLM7888CH低压三相半桥驱动器
7
成立公司好还是一个做好?
8
请教:BJT类有源器件
1
2025年刚开始,就收到了“橄榄枝”!
2
PCB设计第058篇 如何打开IPC-2581格式的PCB加工文件
3
过孔的设计孔径是真的很重要,但高速先生也是真的不关心
4
聊聊RISC-V MCU技术
5
人形机器人疯狂进厂打工!银河通用、智元、乐聚机器人怕是都疯了
6
【工程师故事】+2024年总结之做技术不能想当然
7
电气系统中,如何选择一款最为适配的数字隔离芯片?
8
挑战6万月薪【三】Purple Pi OH开发板带你7天入门OpenHarmony!
1
看懂电路图简单,注意这10大原则7大步骤
2
mps资料:汽车电子DCDC芯片的EMI优化设计
3
信号上为什么要串一个电阻
4
相噪常见的测量有以下几种方式
5
要先MOS管用的好,先搞清楚“米勒效应”
6
VSCODE如何设置TAB键为四个空格?
7
很多电容都有印字,咋贴片陶瓷电容却没有?
8
在PCB生产过程中,影响传输线阻抗的因素
9
汽车磁电型、霍尔型、磁阻型传感器原理
10
避坑指南!12v转5v部分一直炸,一种新的降压电路
分享到
评论
点赞
本网页已闲置超过10分钟,按键盘任意键或点击空白处,即可回到网页
X
最新资讯
631.2亿美元的市场,创新制造工艺将为柔性电子带来什么?
创新的FPGA技术实现低功耗、模块化、小尺寸USB解决方案
特朗普关税威胁下,传三星、LG考虑将家电生产“大挪移”
软银、OpenAI、甲骨文斥巨资建AI项目“星际之门”,马斯克质疑“没钱”
南芯科技拟1.6亿元收购昇生微,加速布局MCU芯片业务
我要评论
0
分享到微信
点击右上角,分享到朋友圈
我知道啦
请使用浏览器分享功能
我知道啦
×
提示!
您尚未开通专栏,立即申请专栏入驻



 ,那么角度分辨率为
,那么角度分辨率为

