


题记:此文为修改后重发,原文出现一些错误,谢谢工程师朋友的发现,对此造成误解深表歉意。
峰值电流模式控制方式在占空比大于50%的时候,系统容易进入不稳定的工作状态:次谐波震荡,就是功率器件的开关波形发生宽脉冲和窄脉冲交替出现的状态,特别是在电感较小情况下,这种现象更容易发生。次谐波震荡导致输出电压纹波突然增加,系统的动态响应变差。
1、次谐波震荡产生原因
BUCK变换器采用峰值电流模式控制方式,占空比小于50%,输出电感的电流波形如图1所示。当系统工作条件改变,产生电流波形扰动为ΔI1,开关周期结束时,电流波形的扰动为ΔI2,如图1中虚线所示。
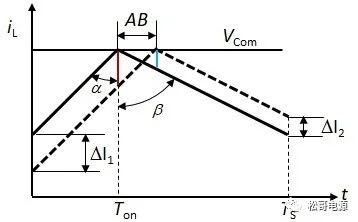
图1 占空比小于50% 的电感电流波形
由几何关系可以得到:
占空比小于50%,a < b,因此,ΔI1 >ΔI2,开关周期结束时,电流变化的扰动减小,几个开关周期后,电流变化的扰动会逐渐减小到0,系统逐渐趋于稳定。
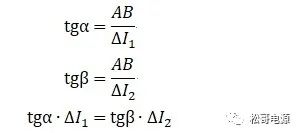
如果占空比大于50%,a >b,因此,ΔI1<ΔI2,开关周期结束时,电流变化的扰动反而增大,在后面工作的开关周期,电流变化的扰动会越来越大,如图2所示,系统无法稳定。
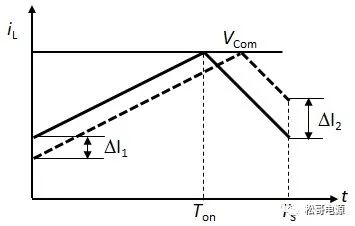
图2 占空比大于50% 的电感电流波形
2、次谐波震荡消除方法
调节环路补偿的参数不能有效解决次谐波震荡的问题,因为次谐波震荡和系统的零点和极点的位置无关。增大电感值,减小电感电流变化的斜率,可以缓解谐波震荡,但会产生其他问题,有效的方法就是使用斜坡补偿,目前很多峰值电流模式控制的IC,内部都会采用斜坡补偿,消除次谐波震荡。
IC内部斜坡补偿信号,通常由时钟信号产生,然后反向加在输出电压反馈的误差放大器的输出端COM,也可以将斜坡补偿直接正向加在电流检测信号上面,一些ACDC的IC采用后一种方式。二种方式的基本原理一样,都是在峰值电流模式控制中引入一定的电压控制模式来稳定系统。增加电感值在一定程度上可以改善次谐波震荡,原理和增加斜坡补偿方式相同。
加入斜坡补偿后,系统工作的电感电流的波形如图3所示,ΔI1>ΔI2,电流扰动变化减小,系统就会逐渐趋于稳定。
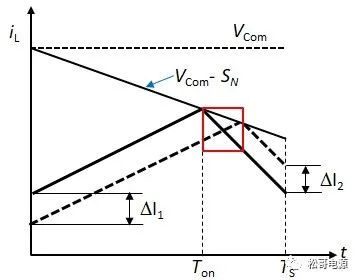
图3 加入斜坡补偿的电感电流波形
将图3中红色矩形区域放大,相应参数对应的几何关系,如图4所示。其中,
S1:电感电流上升的斜率;
S2:电感电流下降的斜率;
SN:斜坡补偿。
ΔI1 = S1 + SN,ΔI2 = S2 - SN。
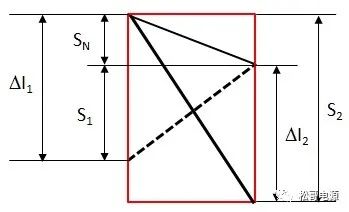
图4 斜坡补偿对应的几何关系
系统满足ΔI1>ΔI2时,才能逐渐趋于稳定,所以:
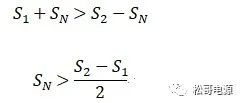
上面公式恒成立时,满足条件为:

因此,这个条件也是系统避免次谐波震荡产生所加的斜坡补偿值。
IC内部所加的斜坡补偿值固定不变,电感电流的斜率会随着输入电压、输出电压和电感值的变化而改变;同时,斜坡补偿会影响最大的限流值,也就会影响系统最大的输出功率,因此,IC内部所加的斜坡补偿值,要根据应用条件,设计中间优化值。有时候,一些IC内部设计专门的电流控制功能,保证限流点不会随输入电压和所加的斜坡补偿而改变。
轻载的时候,电流检测信号非常小,容易受到干扰,也会产生次谐波震荡。同样,加入斜坡补偿后,相当于加入电压控制模式,可以有效消除轻载时产生的次谐波震荡,如图5、图6所示。
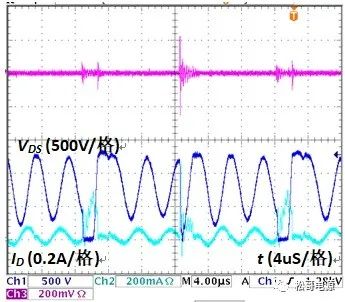
图5 轻载次谐波震荡
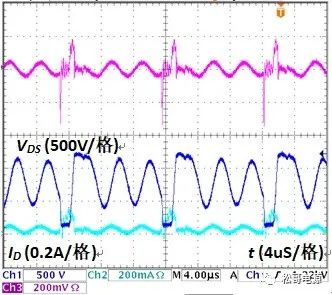
图6 轻载加入斜坡补偿波形
