

简述RTOS
RTOS:Real Time Operating System,即实时操作系统。
来自百度百科的解释:
实时操作系统,体现的重点是实时(及时响应)。简单说就是程序能及时的解决、处理一些比较急的事情,而不会出现“卡机”等情况。
比如:一个运动的小车,传感器检测到前方有障碍物,要立马减速、停车,而不是半天才反应过来(反应慢了就会撞上去)。
与裸机相比
从裸机转RTOS的同学,就会拿裸机与RTOS相比较:
RTOS相比裸机有什么优点?
RTOS相比裸机更方便吗?
......
我可以肯定的说:RTOS相比裸机更方便,优点也更多。当然,前提是MCU资源(Flash、RAM)能满足需求。
因为早期的MCU资源相对匮乏,比如Flash低于10K,RAM低于1K,这个时候用RTOS,优点就不明显,反而更容易暴露缺点。
但现在MCU资源相对比较多,动辄超过1M的Flash、 100K的RAM,这种情况下,如果跑裸机,我感觉太浪费MCU资源了。
此处推荐阅读:
与分时操作系统相比
很多人会联想到分时操作系统(TSOS),RTOS和TSOS有什么区别?各自有什么特点?
现在的处理器速度相对更快了,分时操作系统的实时能力也很高了。它们的区别其实可以从字面意思上理解,分时就是分为时间片,这个时间片很小,一般us级别甚至更低。
你了解一下TSOS分时操作系统的调度机制,你就会更加明白二者之间的区别了。
这一节可以参看我的之前分享的文章:RTOS和TSOS有什么区别?
RTOS真的实时吗?
回到今天的话题:RTOS真的实时吗?
严格来说,RTOS也不是实时响应并处理紧急的事情,只是在很短时间(一般ms级别)就做出了响应,给人感觉就是实时在响应。
单个CPU,在同一个时间只能处理一件事(只能执行一处程序),你创建了任务1、 任务2、 任务3......等多个任务,CPU在执行的时候都是轮流(按照优先级)执行。
1.系统滴答
RTOS实时响应有一个重要的配置,那就是系统滴答(SysTick)。
比如FreeRTOSConfig.h
再比如μCOS系统的os_cfg.h
系统滴答决定了你RTOS底层调度的时间大小,如果设置1000,那么1ms就会调度一次,也就说1ms会做出一次响应。
拿上面小车遇到障碍物为例:传感器检测到障碍物,通知更高优先级任务进行刹车,这个过程只需要1ms就会得到响应。
你肯定说:那我设置10000,是不是0.1ms就会做出响应?是不是系统滴答越大越好?
按理说系统滴答值越大响应越快,但系统调度也是需要占用时间:
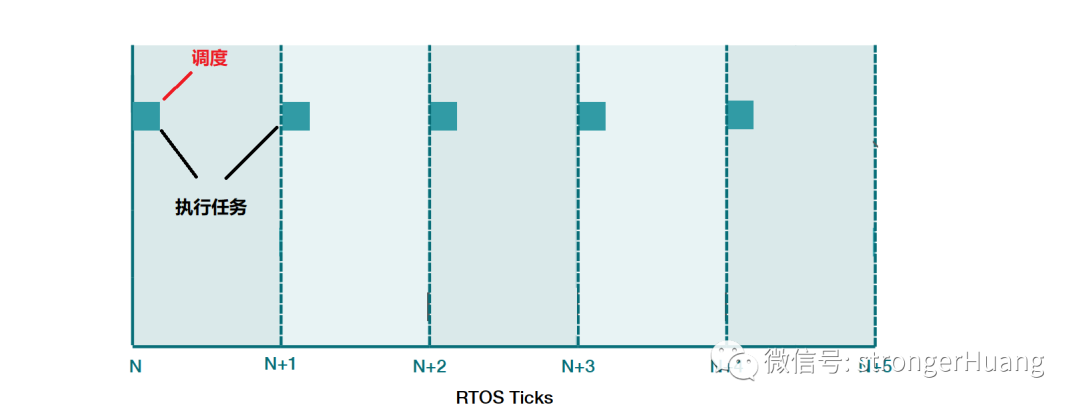
调度的时间长度不变,如果N到N+1之间时间越短(滴答),留给执行任务的时间就越短。
所以,滴答值也不是越大越好,需要一个合理的值,可以参看:实时操作系统的滴答Tick设置多少才合适?
2.硬件中断
从裸机开发转RTOS的同学就有这样一个思维:我用中断就能做到实时响应。
的确,中断能做到实时响应,但不能满足大部分需求。
拿上面小车刹车来说:比如检测到前方障碍物立刻做出中断响应,此刻执行减速的动作,这个动作假如是S曲线(减减速)刹车,执行时间为1s。
如果你在中断函数里面执行这个1s刹车动作,CPU就不会做其他事情了,这样你觉得可以吗?
硬件中断只能做出一个“紧急通知”,不能做出(耗时的)执行动作。
RTOS结合硬件中断就能完美解决这个问题,中断通知高优先级任务执行刹车减速的动作,但这个过程可能需要1ms。
所以,你会发现RTOS并非真正的实时,只是这个时间很短,你感觉不出来。
由于微信公众号近期改变了推送规则,如果您想经常看到我们的文章,可以在每次阅读后,在页面下方点一个「赞」或「在看」,这样每次推送的文章才会第一时间出现在您的订阅列表里。
猜你喜欢:
分享一份嵌入式软件工具清单!
实用 | 10分钟教你搭建一个嵌入式web服务器
干货 | 浅析程序开机自启动
嵌入式周报 | 第 3 期
嵌入式周报 | 第 2 期
嵌入式周报 | 第 1 期
干货 | 嵌入式OTA升级实现原理
几个Makefile通用模板分享!
实用 | 一个高性能通信库的简单使用分享
实用工具 | LVGL GUI-Guider的使用分享
C语言、嵌入式中几个非常实用的宏技巧
在公众号聊天界面回复1024,可获取嵌入式资源;回复 m ,可查看文章汇总。
点击阅读原文,查看更多分享。
点个 呗
呗
