


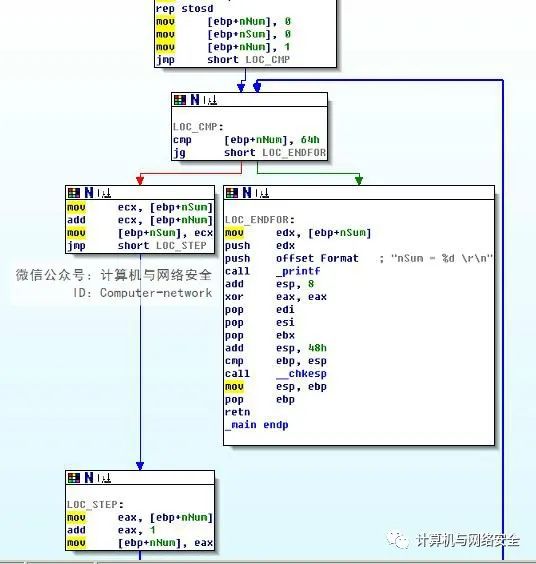
#includeint main(){int nNum = 0, nSum = 0;for ( nNum = 1; nNum <= 100; nNum ++ ){nSum += nNum;}printf("nSum = %d \r\n", nSum);return 0;}
.text:00401028 mov [ebp+nNum], 0.text:0040102F mov [ebp+nSum], 0.text:00401036 mov [ebp+nNum], 1.text:0040103D jmp short LOC_CMP.text:0040103F ; ---------------------------------------------------------.text:0040103F.text:0040103F LOC_STEP: ; CODE XREF: _main+47j.text:0040103F mov eax, [ebp+nNum].text:00401042 add eax, 1.text:00401045 mov [ebp+nNum], eax.text:00401048.text:00401048 LOC_CMP: ; CODE XREF: _main+2Dj.text:00401048 cmp [ebp+nNum], 64h.text:0040104C jg short LOC_ENDFOR.text:0040104E mov ecx, [ebp+nSum].text:00401051 add ecx, [ebp+nNum].text:00401054 mov [ebp+nSum], ecx.text:00401057 jmp short LOC_STEP.text:00401059 ; ---------------------------------------------------------.text:00401059.text:00401059 LOC_ENDFOR: ; CODE XREF: _main+3Cj.text:00401059 mov edx, [ebp+nSum].text:0040105C push edx.text:0040105D push offset Format ; "nSum = %d \r\n".text:00401062 call _printf.text:00401067 add esp, 8.text:0040106A xor eax, eax
初始化循环变量jmp LOC_CMPLOC_STEP:; 修改循环变量LOC_CMP:; 循环变量的判断jxx LOC_ENDFOR; 循环体jmp LOC_STEPLOC_ENDOF:
#int main(){int nNum = 1, nSum = 0;do{nSum += nNum;nNum ++;} while ( nNum <= 100 );printf("nSum = %d \r\n", nSum);return 0;}
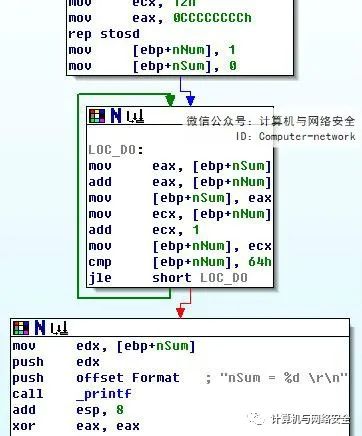
.text:00401028 mov [ebp+nNum], 1.text:0040102F mov [ebp+nSum], 0.text:00401036.text:00401036 LOC_DO: ; CODE XREF: _main+3Cj.text:00401036 mov eax, [ebp+nSum].text:00401039 add eax, [ebp+nNum].text:0040103C mov [ebp+nSum], eax.text:0040103F mov ecx, [ebp+nNum].text:00401042 add ecx, 1.text:00401045 mov [ebp+nNum], ecx.text:00401048 cmp [ebp+nNum], 64h.text:0040104C jle short LOC_DO.text:0040104E mov edx, [ebp+nSum].text:00401051 push edx.text:00401052 push offset Format ; "nSum = %d \r\n".text:00401057 call _printf.text:0040105C add esp, 8.text:0040105F xor eax, eax
初始化循环变量LOC_DO:; 执行循环体; 修改循环变量; 循环变量的比较Jxx LOC_DO
#int main(){int nNum = 1, nSum = 0;while ( nNum <= 100 ){nSum += nNum;nNum ++;}printf("nSum = %d \r\n", nSum);return 0;}
.text:00401028 mov [ebp+nNum], 1.text:0040102F mov [ebp+nSum], 0.text:00401036.text:00401036 LOC_WHILE: ; CODE XREF: _main+3Ej.text:00401036 cmp [ebp+nNum], 64h.text:0040103A jg short LOC_WHILEEND.text:0040103C mov eax, [ebp+nSum].text:0040103F add eax, [ebp+nNum].text:00401042 mov [ebp+nSum], eax.text:00401045 mov ecx, [ebp+nNum].text:00401048 add ecx, 1.text:0040104B mov [ebp+nNum], ecx.text:0040104E jmp short LOC_WHILE.text:00401050 ; -----------------------------------------------------------.text:00401050.text:00401050 LOC_WHILEEND: ; CODE XREF: _main+2Aj.text:00401050 mov edx, [ebp+nSum].text:00401053 push edx.text:00401054 push offset Format ; "nSum = %d \r\n".text:00401059 call _printf.text:0040105E add esp, 8.text:00401061 xor eax, eax
初始化循环变量等LOC_WHILE:cmp xxx, xxxjxx LOC_WHILEEND; 循环体jmp LOC_WHILELOC_WHILEEND:
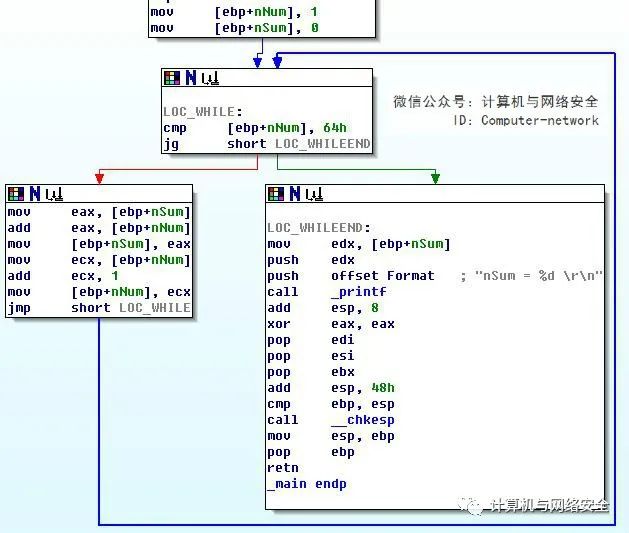
对于for循环、do循环和while循环这3种循环而言,do循环的效率显然高些,而while循环相对来说比for循环效率又高些。
