
之前写过一篇在nano上使用opencv,nano上默认是安装了opencv的库,除了nano,我们自己电脑上也想使用opencv做一些平时图像处理验证。
本来也是看一些资料安装好的,觉得也没必要写。但是实际安装还是出现了不少问题,所以记录分享一下。
环境:系统为ubuntu20.04
cv版本为 4.5
作者:良知犹存
转载授权以及围观:欢迎关注微信公众号:羽林君
或者添加作者个人微信:become_me
OpenCV的全称是Open Source Computer Vision Library,是一个跨平台的计算机视觉库。OpenCV是由英特尔公司发起并参与开发,以BSD许可证授权发行,可以在商业和研究领域中免费使用。OpenCV可用于开发实时的图像处理、计算机视觉以及模式识别程序。
OpenCV用C++语言编写(基本上现在新的开发和算法都是用C++接口),它的主要接口也是C++语言,但是依然保留了大量的C语言接口。该库也有大量的Python, Java and MATLAB/OCTAVE (版本2.5)的接口。这些语言的API接口函数可以透过在线文档获取。现在也提供对于C#, Ch,Ruby的支持。
OpenCV可以在Windows, Android, Maemo, FreeBSD, OpenBSD, iOS, Linux和Mac OS等平台上运行。用户可以在Github获得官方版本,或者从Git获得开发版本。OpenCV也是用CMake.
到了安装环节了,先装一堆依赖包。
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev pkg-config
下载opencv,下载地址:https://opencv.org/releases/,大可以点击Sources进行下载自己需要的版本。
刚开始选择了4.1 安装出错之后,选择了 4.5就一路按照4.1的经验就装好了,所以建议装最新的。
下载之后,我们就开始编译安装了,
常规操作:
cd opencv-4.5.5
mkdir build
cmake ../
make
但是事情不是按照命令这么发展的,命令很少,解决问题确是很多。
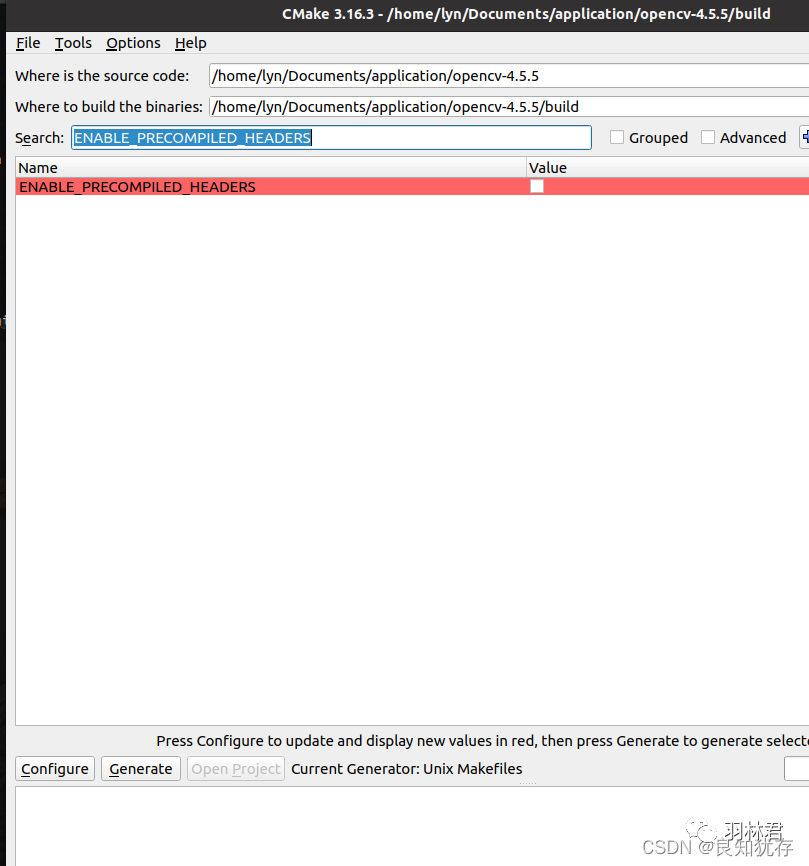
cmake编译的时候,推荐一个cmake图形化工具,很方便。
sudo apt install cmake-qt-gui
cmake-gui ../
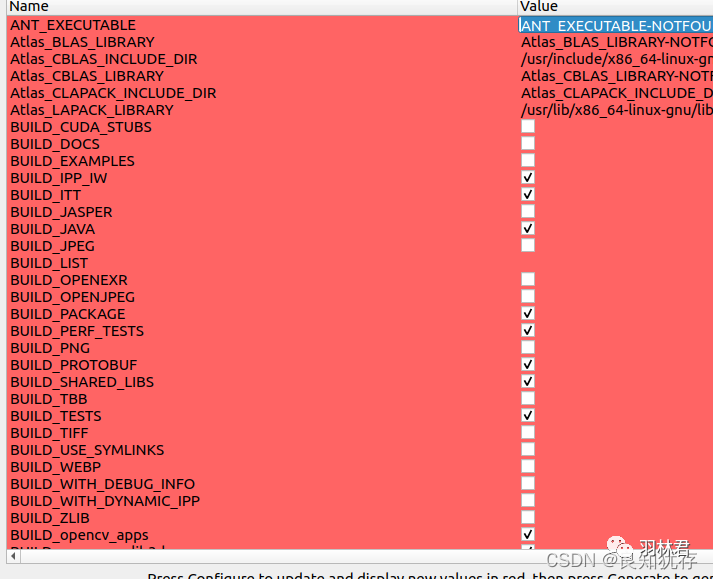
我们Search一栏选择我们要配置的cmake 选项,然后选择 generate生成就好了。
cmake ../之后开始make:
make -j8
eigen库未安装遇到fatal error: Eigen/Core: No such file or directory 这个错误:
方法1:
执行命令:sudo apt-get install libeigen3-dev 进行安装。
方法2:因为我安装过一次了,所以我查看了一下我的eigen,使用是locate 查询了一下,locate eigen3,
/usr/include/eigen3
/usr/include/eigen3/Eigen
发现了我的Eigen在eigen3目录下。
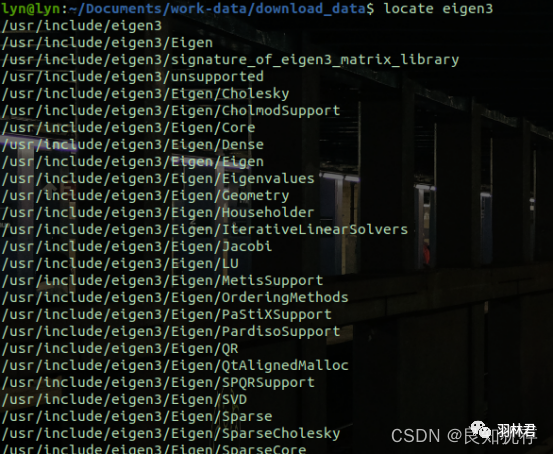
所以我写了一个软链进行了链接
sudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen


继续编译 `make -j8
编译 opencv 出现 internal compiler error:Segmentation fault,并且一直出现。
出错的原因是(虚拟机)运行内存不足,而大量template的扩展需要足够的内存。
下面给大家分享一种方法解决这个报错,我选择不管,继续编译。
可以通过临时使用交换分区来解决:
sudo dd if=/dev/zero of=/swapfile bs=64M count=16
#count的大小就是增加的swap空间的大小,64M是块大小,所以空间大小是bs*count=1024MB sudo mkswap /swapfile
#把刚才空间格式化成swap格式 sudo swapon /swapfile
#使用刚才创建的swap空间 在编译完成后,最好可以关闭(释放)交换空间sudo swapoff /swapfile sudo rm /swapfile
以上交换分区方法为引用了别的博主的片段
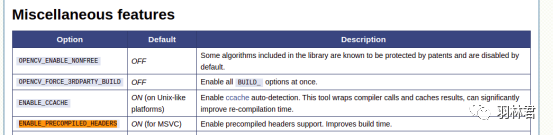
编译的时候,也设置 cmake 选项 ENABLE_PRECOMPILED_HEADERS=OFF ,启用预编译头支持。缩短构建时间。
sudo cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ENABLE_PRECOMPILED_HEADERS=OFF
继续 make -j8

终于编译完成,进入了安装阶段 make install
sudo make install
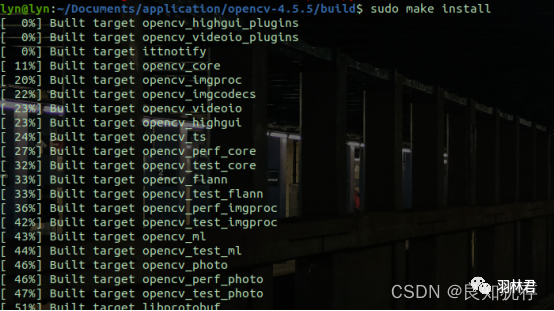
可以看到安装的动态库和文件都在/usr/local/目录里面
OpenCV4默认不生成.pc文件,所以我们需要自己去设置,也有人建议cmake后再加一条-D OPENCV_GENERATE_PKGCONFIG=ON才会生成。该编译选项开启生成opencv4.pc文件,就支持pkg-config功能,这个部分大家可以自行去尝试一下,我自己使用了手动添加的方法,比较笨,但是可以用。
cd /usr/local/lib
sudo mkdir pkgconfig && cd pkgconfig
sudo vi opencv.pc
文件内容如下:对应的Version大家按照自己的版本修改,libs内容需要微调,后面有给我自己的情况。
prefix=/usr/local
exec_prefix=${prefix}
includedir=/usr/local/include
libdir=/usr/local/lib
Name: OpenCV
Description: Open Source Computer Vision Library
Version: 4.5.5
Libs: -L${exec_prefix}/lib -lopencv_stitching -lopencv_superres -lopencv_videostab -lopencv_aruco -lopencv_bgsegm -lopencv_bioinspired -lopencv_ccalib -lopencv_dnn_objdetect -lopencv_dpm -lopencv_face -lopencv_photo -lopencv_freetype -lopencv_fuzzy -lopencv_hdf -lopencv_hfs -lopencv_img_hash -lopencv_line_descriptor -lopencv_optflow -lopencv_reg -lopencv_rgbd -lopencv_saliency -lopencv_stereo -lopencv_structured_light -lopencv_phase_unwrapping -lopencv_surface_matching -lopencv_tracking -lopencv_datasets -lopencv_text -lopencv_dnn -lopencv_plot -lopencv_xfeatures2d -lopencv_shape -lopencv_video -lopencv_ml -lopencv_ximgproc -lopencv_calib3d -lopencv_features2d -lopencv_highgui -lopencv_videoio -lopencv_flann -lopencv_xobjdetect -lopencv_imgcodecs -lopencv_objdetect -lopencv_xphoto -lopencv_imgproc -lopencv_core
Libs.private: -ldl -lm -lpthread -lrt
Cflags: -I${includedir}
后续在使用makefile -L链接时候 发现本机上面-lopencv_xfeatures2d 没有此动态库,所以就去掉了,大家也可以自行去测试,有些部分的版本有点区别,对应makefile的操作,大家可以移步看我之前的文章:jetson-nano opencv基础使用

sudo vi /etc/bash.bashrc
修改bash.bashrc文件,增加如下文件
export PKG_CONFIG_PATH=/usr/local/lib/pkgconfig:$PKG_CONFIG_PATH
再执行source /etc/bash.bashrc
这样之后,我们就可以pkg-config查询对应安装好的opencv信息了
pkg-config --modversion opencv
pkg-config --libs opencv

此外我们也可以通过使用python3 import cv2的方法查询opencv是否安装成功
lyn@lyn:/usr/local/lib/pkgconfig$ python3
Python 3.8.10 (default, Nov 26 2021, 20:14:08)
[GCC 9.3.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import cv2
>>> print(cv2.__version__)
4.5.5
>>>
对应的截图: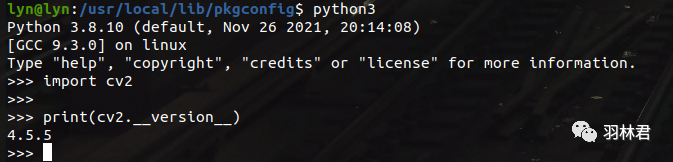
#include
#include
#include
#include
using namespace cv;
using namespace std;
void face_detection_demo()
{
std::string root_dir = "/home/lyn/Documents/opencv/learn_code/face_detector/";
dnn::Net net = dnn::readNetFromTensorflow(root_dir+ "opencv_face_detector_uint8.pb", root_dir+"opencv_face_detector.pbtxt");
VideoCapture capture(0);
Mat frame;
while (true) {
capture.read(frame);
if (frame.empty()) {
break;
}
flip(frame, frame, 1);//左右翻转 y对称
Mat blob = dnn::blobFromImage(frame, 1.0, Size(300, 300), Scalar(104, 177, 123), false, false);
net.setInput(blob);// NCHW
Mat probs = net.forward(); //
Mat detectionMat(probs.size[2], probs.size[3], CV_32F, probs.ptr<float>());
// 解析结果
for (int i = 0; i < detectionMat.rows; i++) {
float confidence = detectionMat.at<float>(i, 2);
if (confidence > 0.5) {
int x1 = static_cast(detectionMat.at<float>(i, 3)*frame.cols);
int y1 = static_cast(detectionMat.at<float>(i, 4)*frame.rows);
int x2 = static_cast(detectionMat.at<float>(i, 5)*frame.cols);
int y2 = static_cast(detectionMat.at<float>(i, 6)*frame.rows);
Rect box(x1, y1, x2 - x1, y2 - y1);
rectangle(frame, box, Scalar(0, 0, 255), 2, 8, 0);
}
}
imshow("人脸检测演示", frame);
int c = waitKey(1);
if (c == 27) { // 退出
break;
}
}
}
int main(int argc,char **argv) {
face_detection_demo();
return 0;
}
CMakeLists.txt文件
cmake_minimum_required( VERSION 2.8 )
project(opencv_test)
set(CMAKE_CXX_FLAGS "-std=c++14 ${CMAKE_CXX_FLAGS} -Wall -Wformat -Wformat-security -Werror=format-security -Wunreachable-code")
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(opencv_test main.cpp )
target_link_libraries(opencv_test ${OpenCV_LIBS})
对应的CMakeLists.txt文件和jetson-nano opencv基础使用基本一样。详细注解大家可以移步去看这篇文章。
上面那两个文件是调用opencv里面dnn的例子,对应的文件获取方式如下:
涉及到pb文件需要下载,有可能出现下载失败的情况,如果大家需要这个文件,也可以加我微信,我私发给需要的朋友们。
其中opencv_face_detector.pbtxt文件在samples/dnn/face_detector/目录中
cd opencv-4.5.5/samples/dnn/face_detector/
ls

opencv_face_detector_uint8.pb比较麻烦些,需要下载。方式如下:
cd opencv-4.5.5/samples/dnn
python3 download_models.py
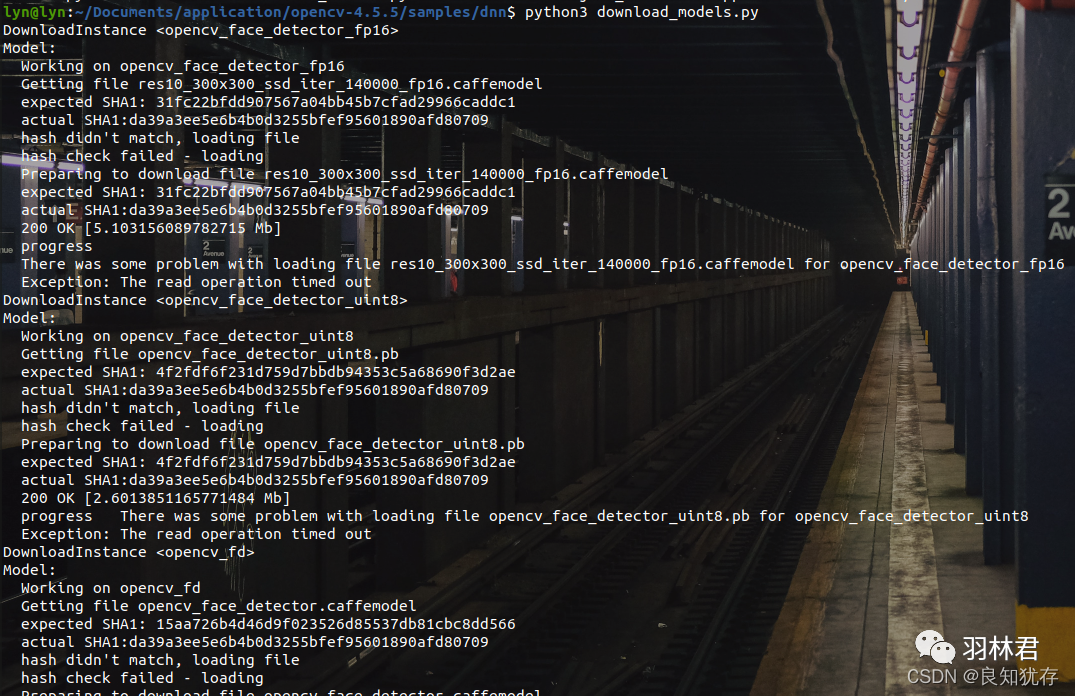
有Caffe模型,还有tensorflow模型。我们用的tensorflow模型,opencv_face_detector_uint8.pb文件就是从这里来。
Scalar(104, 177, 123)这个参数是/opencv-4.5.5/samples/dnn里面对应的,models.yml文件里面有。
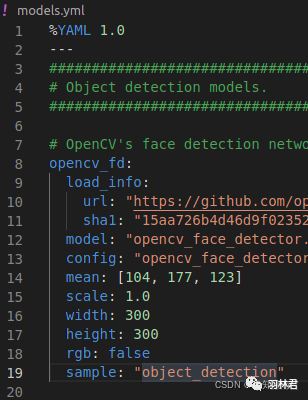 如上所示,我也是直接使用了。
如上所示,我也是直接使用了。
最终实现效果如下:

这就是我自己安装opencv的过程分享。如果大家有更好的想法和需求,也欢迎大家加我好友交流分享哈。
作者:良知犹存,白天努力工作,晚上原创公号号主。公众号内容除了技术还有些人生感悟,一个认真输出内容的职场老司机,也是一个技术之外丰富生活的人,摄影、音乐 and 篮球。关注我,与我一起同行。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
推荐阅读
【1】jetson nano开发使用的基础详细分享
【2】Linux开发coredump文件分析实战分享
【3】CPU中的程序是怎么运行起来的 必读
【4】cartographer环境建立以及建图测试
【5】设计模式之简单工厂模式、工厂模式、抽象工厂模式的对比
本公众号全部原创干货已整理成一个目录,回复[ 资源 ]即可获得。
