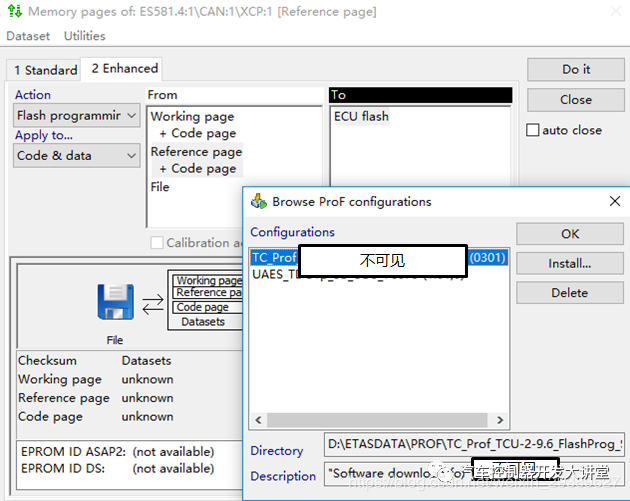


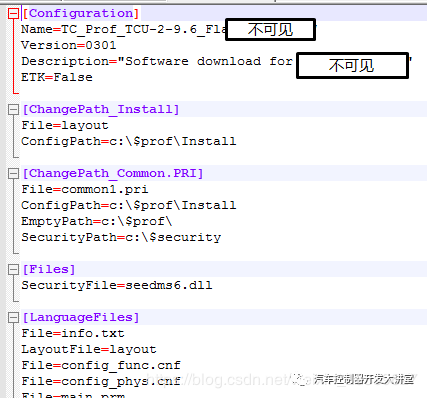
[Configuration]Name=TC_Prof_XXXVersion=0301Description="Software download for XXX Project."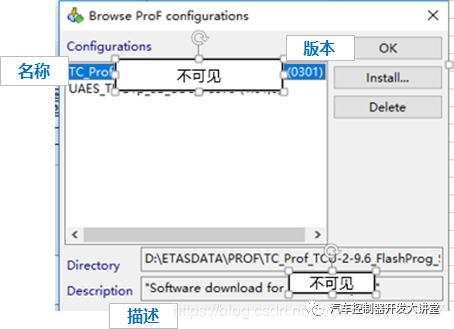
[ChangePath_Install]File=layoutConfigPath=c:\$prof\Install[ChangePath_Common.PRI]File=common1.priConfigPath=c:\$prof\InstallEmptyPath=c:\$prof\SecurityPath=c:\$security[Files]SecurityFile=seedms6.dll
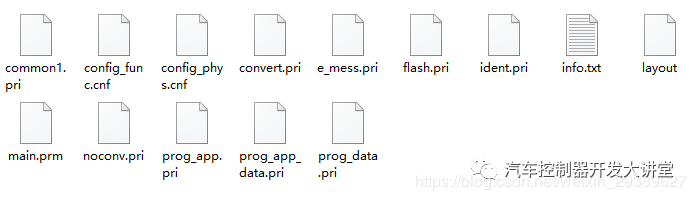
[LanguageFiles]File=info.txtLayoutFile=layoutFile=config_func.cnfFile=config_phys.cnfFile=main.prmFile=common1.pri...
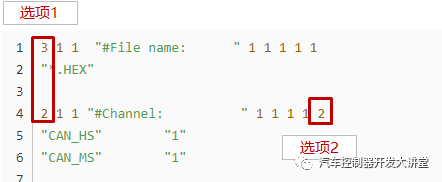
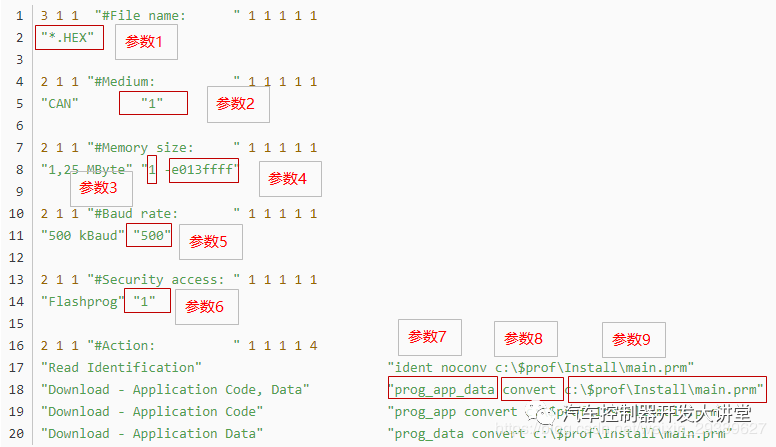
********************************************************************************** Configuration Software download for xxx access **********************************************************************************;ECU_ADDR:, 0x7C; ; address of ECUPROJECT_NAME:, Software download for xxxPROG_ST_ADDR:, 0xF1; ; address of tester on K-Line;PENDING_TIMEOUT:, 5000; ; timeout value for 'pending response';; ; V_Prog = (Vpp * MAX) / 4096; 0 Volt 5 Volt 12 Volt 16 Volt freiSSC_UPROG_VALUES:, 0x0000, 0x02bc, 0x0690, 0x08c0, 0x0000;;; ; timing parameter for stimulation; Index p1Max p2Min p2Max p3Min p3Max p4Min;;KWP2000_TP:, 1, 0x0014, 0x0000, 0x0032, 0x0037, 0x1388, 0x0000;; ; timing parameter for maximum speed;;; ; parameter for key71 stimulation; baud w1 w2 w3 w4Min w4Max w5;KWP2000_STP:, 0x14, 0x1e, 0xc8, 0xc8, 0x19, 0x32, 0x1e;;; ; parameter for KWP2000 stimulation; Index tiniL wuP reizLtg reiztypKWP2000_SP:, 1, 0x0019, 0x0032, 0x00, 0x81;;; Index Baudrate i k ; some baud rates for this ECU;HIGH_BDR:, 1, 500000, 0, 20;;DIAG_MODE:, 0x02; ; xx Flash programming;; index count dataSECURITY_ACCESS_MODE:, 1, 1, 0x05; ; SLD security access mode;; Routine no. Code for RNC Result flag; ; no. of loc. routine for erasing FlashLOC_ROUTINE_ERASE:, 0xFF00, 0x21, 0x01; ;direct result; ; no. of loc. routine for checksum calculationLOC_ROUTINE_CHK:, 0xFF01, 0x23, 0x01; ;direct result;VERIFY_METHOD:, 0x02; ; code for CRC32;CHECKSUM_RESULT_INVERSION:, 0x01 ; activate checksum inversion;ADDRESS_AND_LENGTH_FORMAT_IDENTIFIER:, 0x44; general settingAALFI_FOR_CHECKSUM_CALCULATION:, 0x44;AALFI_FOR_WRITE_MEMORY_BY_ADDR:, 0x33;AALFI_FOR_READ_MEMORY_BY_ADDR:, 0x33;AALFI_FOR_DYNAMICALLY_DEFINE_DATA_ID:, 0x33;AALFI_FOR_REQUEST_DOWNLOAD:, 0x44;DATA_FORMAT_IDENTIFIER:, 0x00;;;MAX_LENGTH:, 0xfc; ; Patch for maximum length of transfer;;ERASE_MEM_AREA:, 1, 0x00, 0x00, 0x100000L, 0x13FFFFL; Data sectionERASE_MEM_AREA:, 2, 0x00, 0x00, 0x020100L, 0x0FFFFFL; APPL;;CAN;===;ECU_TO_INCA_CAN_ID:, 0x000007xx;;TGT_INCA:, 0xE1; EXTENDED ADDRESSINCA_TO_ECU_CAN_ID:, 0x000007xx;;TGT_ECU:, 0xE9; EXTENDED ADDRESS;3 1 1 "#File name: " 1 1 1 1 1"*.HEX"2 1 1 "#Channel: " 1 1 1 1 2"CAN_HS" "1""CAN_MS" "1"2 1 1 "#Action: " 1 1 1 1 4"Read Identification" "ident noconv c:\$prof\Install\main.prm""Download - Application Code, Data" "prog_app_data convert c:\$prof\Install\main.prm""Download - Application Code" "prog_app convert c:\$prof\Install\main.prm""Download - Application Data" "prog_data convert c:\$prof\Install\main.prm"

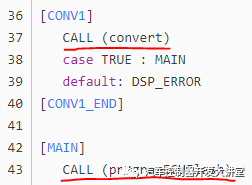
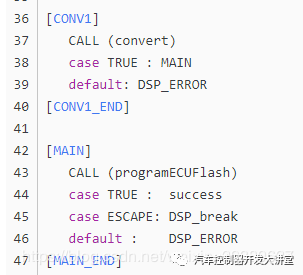
;%;% : hex file conversion;% convert = convert;% noconv = do not convert;%========================================================================#include "define.pri"#include "error_mess.pri"#include "%7.pri"#include "%8.pri";----------------------------------------------------------------------------; Main programm;----------------------------------------------------------------------------[START] DEFAULT_SCREEN_LAYOUT (FALSE) EXTENDED_MESSAGE(FALSE) DISPLAY_MESSAGE ("START section!!! ",FALSE) case TRUE : INIT_CNF default : INIT_CNF[START_END][INIT_CNF] INIT_FLASH_PROGRAMMING(ECU_ADDRESS,1,CONFIG"phys.cnf") case TRUE : INIT_USB default: DSP_ERROR[INIT_CNF_END][INIT_USB] UDSB_INIT_COMMUNICATION case FPA_ACK : CONV1 default: DSP_ERROR[INIT_USB_END][CONV1] CALL (convert) case TRUE : MAIN default: DSP_ERROR[CONV1_END][MAIN] CALL (programECUFlash) case TRUE : success case ESCAPE: DSP_break default : DSP_ERROR[MAIN_END][success] EXTENDED_MESSAGE(FALSE) default : EXIT[success_END] 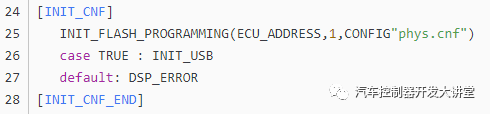
procedure programECUFlash{ [INFO] SHOW_PROGRAMMING_INFO (1,"%1."EXT,1) case TRUE : start default : $return [INFO_END]

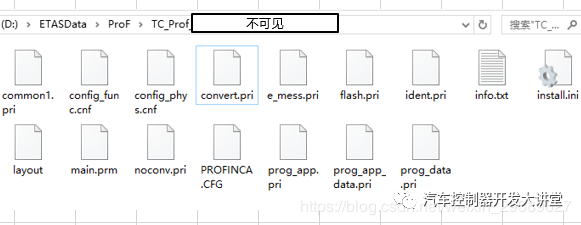

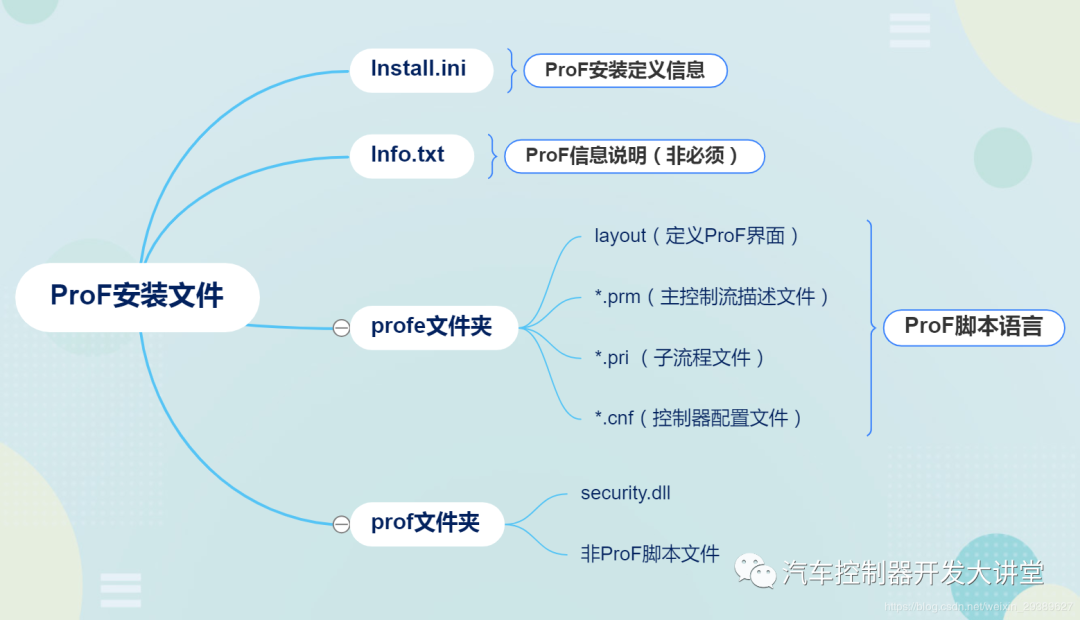
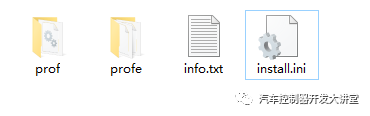
这里就是之前 2.2 章节中提及的 install.ini 安装文件[ChangePath]属性作用,实际上INCA在安装ProF脚本的过程中会自动将install.ini [Files][LanguageFiles] 里面的文件全部复制到INCA指定的目录中。
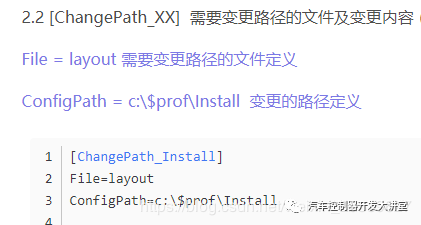
而后INCA会根据[ChangePath_XX]里面的信息,变更里面指定文件File = XX
指定配置路径的ConfigPath = XX 全部转换成安装后的实际路径
四、总结
ProF脚本还可以调用基于windows的控制台*.exe文件或.dll文件,实现更多扩展功能。各位可参照ProF Documentation文档进行开发。本文基于个人有限的经验整理而得,若有错误敬请指正。
小编整理了一些有价值的资料,放置在知识新球。

推荐阅读
