

点击上方↑↑↑“OpenCV学堂”关注我
来源:公众号 英特尔物联网 授权
使用OpenVINO™ 进行应用优化的工作流如下:
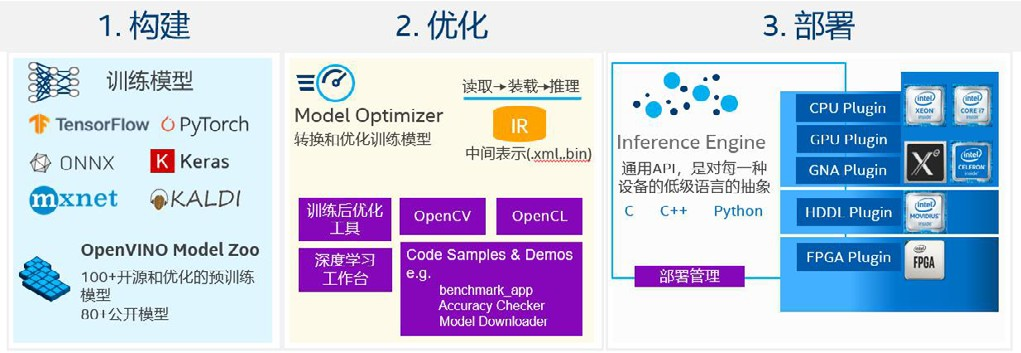
图1 OpenVINO™ 的工作流程
如图1 所示,首先,开发者需要基于开源的深度学习框架如Tensorflow, PyTorch 等构建并训练自己的神经网络模型,生成预训练模型;然后,通过OpenVINO™ 中的MO,将预训练模型转换成IR(Intermediate Representation)文件,即中间表示文件。最后,通过OpenVINO™ 中的推理引擎(Inference Engine)读取 IR 文件,并根据当前实际的部署设备,调用对应设备的插件,如CPU插件、GPU插件(此处GPU指Intel GPU,包括集成显卡iGPU和独立显卡dGPU)等完成推理的调用及优化,输出最终的推理结果。
不难看出,环节二是OpenVINO™ 部署的第一步,也是后续推理操作的基础,因此掌握模型转换技术对于广大开发者尤为重要。
MO的作用包括模型模式转换和拓扑优化,此外也支持对模型进行从FP32到FP16的量化。
通过模型优化器(Model Optimizer)提升性能

图2 通过MO 提升推理性能
如图2 所示,MO 完整的工作流程包括:首先对预训练模型进行拓扑分析,然后判断是否需要进行低精度量化,接着执行拓扑优化,最后进行格式转换。其中拓扑优化的原理主要是基于数学运算,去除模型中的冗余部分;此外,有些拓扑只会在训练阶段用到,推理时并不会用到,也会将这些拓扑摘除。如果想进一步了解MO优化的原理,请参考官方文档:
https:// docs.openvino.ai/latest/openvino_docs_MO_DG_Default_Model_Optimizer_Optimizations.html
MO属于很重要同时也是极易出现问题的环节,笔者对OpenVINO™ 官方github上的issue
(https://github.com/openvinotoolkit/ openvino/issues)进行了简单的统计,如下表所示:

表1 OpenVINO™ issue 统计结果
由此可见,在整个OpenVINO™ 的开发过程中,MO是个难点,很容易遇到问题,尤其是对于刚接触OpenVINO™ 的开发者,上手不太容易。
OpenVINO™ 的产品团队也意识到这个问题,因此陆续推出了帮助开发者跳过MO这一步骤的方法,比如推理引擎直接读取onnx 格式,但是模型转换仍然具有其不可替代性,现阶段仍然需要开发者花时间去研究掌握。
为什么要进行模型转换

图3 模型转换的必要性
如图3 所示,模型转换的必要性可以总结为5点:
■ 跨硬件平台 统一的IR格式可以确保模型运行在不同架构的硬件平台上, 并且方便统一管理和调试。 |
■ 拓扑层优化 MO会对模型拓扑进行优化,从而减少模型大小和降低模型复杂度。 |
■ 与原生框架解耦 IR格式独立于原生框架,部署工程师不需要了解原生框架的细节,降低学习成本。 |
■ 低精度量化 OpenVINO™ 自带的低精度量化工具仅支持对IR格式的模型进行低精度量化。 |
■ 模型大小压缩 OpenVINO™ 自带的压缩工具仅支持对IR 格式的模型进行压缩,同时OpenVINO™ 中自带的其它工具,比如dl workbench(https://docs.openvino.ai/latest/ /workbench_docs_Workbench_ DG_Introduction.html)也只支持针对IR格式的操作。 |
综上,模型转换技术是一门非常重要的技术,并且具有一定的上手门槛,值得我们花时间精力来好好的掌握。
笔者总结了一下,模型转换中的常见问题可以大致归纳为以下几类:
■ 转换参数太多,不熟悉每个参数的作用,不知道该怎样指定MO参数。 |
■ 遇到问题不知道去哪里找资料,没有解决思路。 |
■ 转换虽然成功,但在推理时结果不正确,无法定位问题在哪里。 |
■ 模型中存在自定义算子,MO不支持。 |
下面将通过实际的案例,给大家一一讲解对应的解决方法。
案例一:合理的利用模型转换参数
问题描述:
某目标检测模型如图4 所示含有两个输入,且输入层张量的维度中带有?号。其中Placeholder 的layout 为N,H,W,C,shape 是动态的;Placeholder_1 的shape 是固定的,但值需要锁定为[H,W,N]。使用MO转换且不设置任何MO参数的情况下,转换失败。
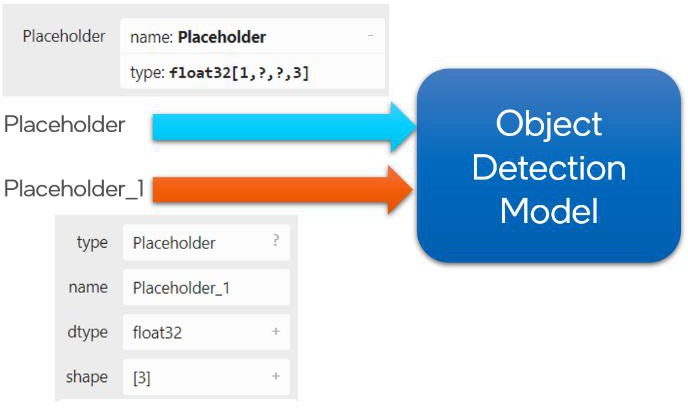
图4 目标检测模型示意图
需要解决的问题:
1) MO是否支持维度中带有? 号
2) 两个输入如何指定MO参数?
解决方法:
通过查阅官方文档:
https://docs.openvino.ai/latest/openvino_
doc s _MO_DG_prepare_model _conver t _model _ Converting_Model.html,可得知上述两个问题的答案:
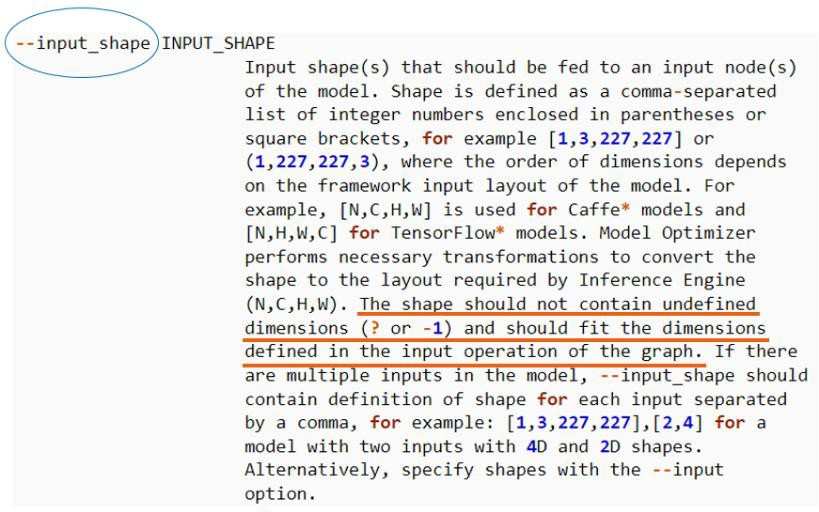
图5 input_shape 参数说明
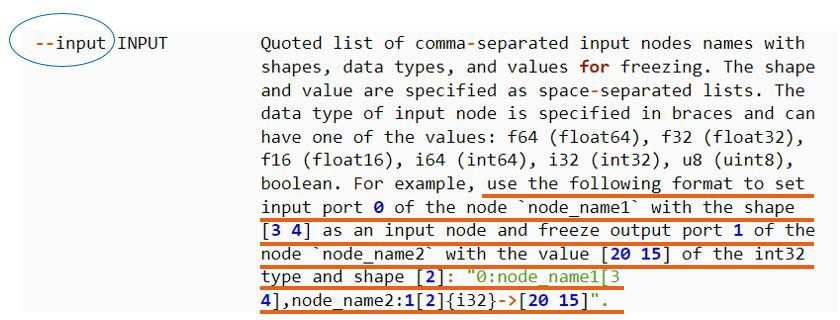
图6 input 参数说明
针对问题1),通过图5 得知,MO不支持shape 中含有?,如果含有? 或-1,需要通过指定参数将shape 锁定为固定值。
针对问题2),通过图6 得知,如果需要锁定输入参数的值,可以通过指定input 参数实现,具体到本例中,Placeholder_1 需要锁定为[H,W,N]。假设 batch 设为1,H设为600,W设为600,则Placeholder需要将shape 固定为(1,600,600,3), 而Placeholder_1 需要将值锁定为[600,600,1]。
因此本例中MO转换时,需要添加如下关键参数:--input "Placeholder [1 600 600 3], Placeholder_1[3]->[600 600 1]" 即可完成转换。
案例二:MO 转换完成,但后续检测结果不正确
问题描述:
模型转换成功,但是预测结果与原生框架大相径庭。
需要解决的问题:
如何定位问题出在哪里及如何解决?
解决方法:
步骤一:更换推理设备
此步骤是为了排除由于设备差异造成的bug。如果在不同设备上都是同样的问题,那说明与设备无关,此时可以进行步骤二。如果在不同设备上表现不同,比如在GPU上表现异常,而在CPU上表现正常,则可以认定为GPU上存在bug,需要将此bug 提交到Github上的issue 中,等待官方补丁。
步骤二:检查推理程序中的前处理代码
此处需要重点排查颜色格式,layout,归一化处理。具体的说:
1)颜色格式:推理引擎使用的默认颜色格式为BGR,如果预训练模型采用的是RGB,那么在作MO转换时,需要如图7 所示,指定--reverse_input_channels 参数,此错误极为常见。
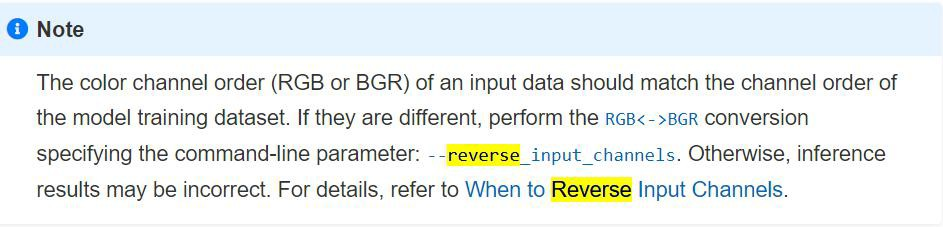
图7 reverse_input_channels 参数说明
2)layout检查:推理引擎使用的默认layout为NCHW, 无论是何种原生框架,MO在转换时均会默认将模型转为NCHW的layout。因此在写推理程序时,需要将图片数据按照NCHW的格式传给推理引擎。此错误出现几率不高,但也需要自查。
3) 归一化检查:MO转换时,可以通过指定 --mean_values 和--scale_values 指定归一化参数,公式为:normalized_x= (x-mean_values)/scale_values。指定后,在推理代码中不再需要进行归一化操作。如果不在MO转换时指定归一化参数, 则在推理代码中需要正常进行归一化操作。此错误有较高出现几率,但较为容易自查。
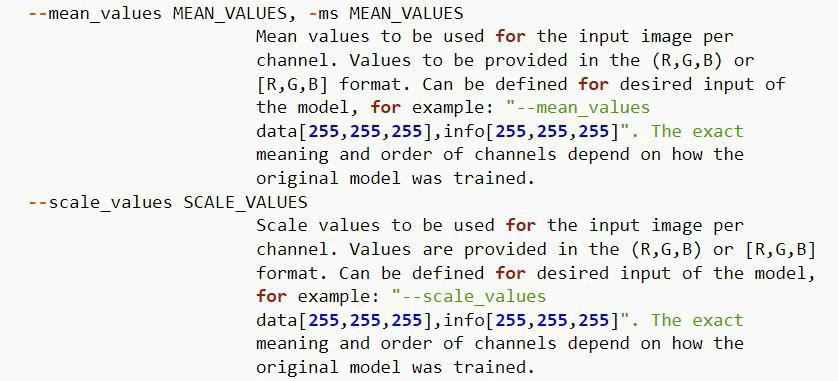
图8 mean_values 和scale_values 参数说明步骤
步骤三:提交官方 github issue,等待官方支持
步骤一和二能解决绝大多数的预测结果不正确的问题,如果反复检查仍不能解决,则需要整理测试用例提交到官方的issue版块,注意该版块只支持英文,一般五个工作日内能够得到回复。
案例三:算子不支持的问题
这类问题官方有标准解决方案,基本方法是按照官方提供的 模 版 实 现 不 支 持 的 算 子, 感 兴 趣 的 可 查 看 官 方 文 档:
https://docs.openvino.ai/latest/openvino_docs_HOWTO_Custom_Layers_Guide.html
笔者这里提供另外一种解决思路,即通过MO对模型进行分割,将不支持的部分单独切出来,使用 c++ 或者 python 实现不支持的部分,而支持的部分使用 MO 进行转换。这种方式的原理,是MO支持通过参数 --input 和 --ouput 实现模型的切割,虽然具有局限性(若模型非常复杂则不适用),但也不失为一种选择。下面通过具体的示例进行讲解,该示例来自 于 github 仓 库:
https://github.com/yas-sim/openvinomodel-division-and-simple-custom-layer
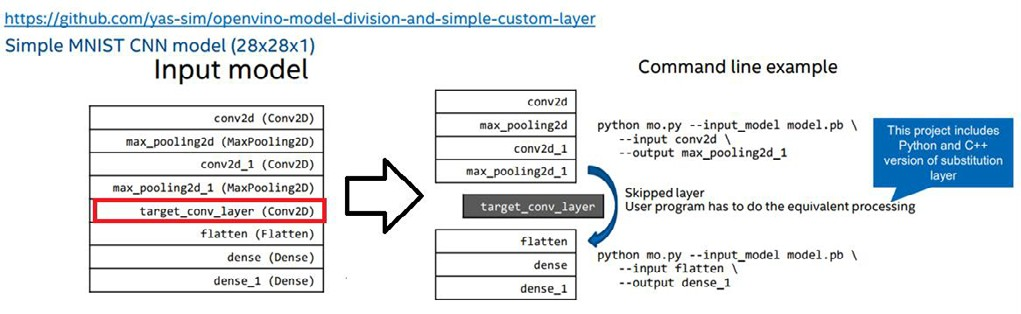
图9 模型切割示例
如图9 所示,Input model 中存在不支持的算子target_ conv_layer,因此在转换时,通过指定--input 和--output(参考Command line example),将原始模型切割为两个子模型,其中子模型1 中的输入与原始模型相同,为conv2d,而输出为 max_pooling2d_1;子模型2 中的输入为flatten,而输出与原始模型相同,为dense_1。
经过上述操作,我们可以得到两个成功转换的ir 文件,分别来自于子模型1 和子模型2,称之为ir1 和ir2。接下来,在推理代码中,我们通过python 或者是c++ 来实现 target_ conv_layer 的运算。这样,当ir1 成功完成推理,得到中间数据data1,我们将data1 输入给target_conv_layer 的等价实现,然后得到其输出data2;最后将data2 输入给ir2,从而得到最终的输入结果。
本例中,虽然input model 直接转换会失败,但通过灵活运用MO切割模型的特性,我们也可以成功完成模型的转换和部署。
OpenVINO™ 工具套件从2018 年底诞生到如今,已经发展了三个年头, 经过了大量合作伙伴的使用和检验,产品已经比较稳定和成熟, 本文中提到的三个案例,涵盖了MO中遇到的绝大多数问题, 大家可以按图索骥。除去上面讲到的解决思路外,官方还专 门整理了MO转换中的常见错误:
https://docs.openvino.ai/ latest/openvino_docs_MO_DG_prepare_model_Model_ Optimizer_FAQ.html,当遇到问题时,可以先查阅此页面是 否已有解决方案。
同时,回顾本文中的示例,可以发现掌握MO的核心关键是文档的阅读和理解,只有充分的理解了MO的各个参数,才能灵活运用以帮助我们更好的解决问题。

