大家好,我是张巧龙,今天给大家带来一个平衡自行车,我实验室一个19级的本科生做的,他今年也获得了全国电赛二等奖(F题)的成绩。
人嘛,非常帅的一个小伙子。B站ID:_旺仔小菠萝,欢迎大家围观!
好了,废话不多说,直接开整!先看展示视频,相关方案在后文。
文末开源所有文件(已经获得本人授权),程序、电路、3D打印文件。
01

使用教程链接:https://blog.csdn.net/weixin_44325419/article/details/110727911

该电机自带驱动和光电编码器。
该自平衡自行车中我们使用万宝至无刷伺服电机,内置驱动,支持正反转,PWM调速,并且带有100线编码器AB相双通道信号输出。
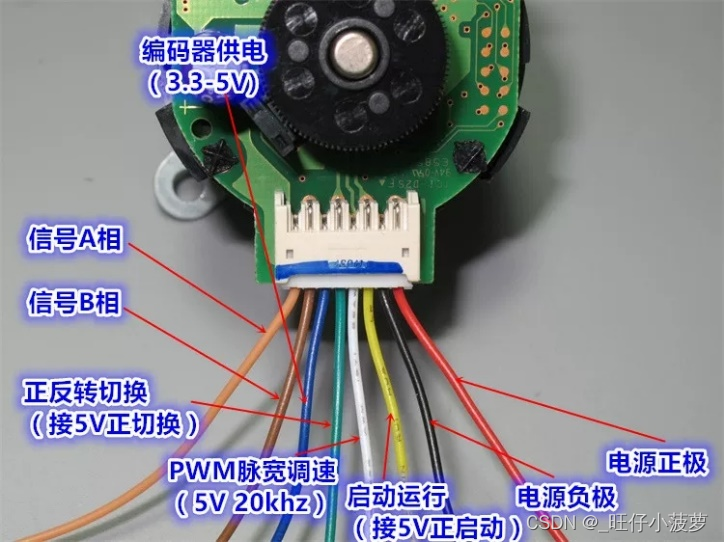
该电机接线图如上图所示,实际小车中的线的颜色可能与上图有所不符,大家要按照位置来判断而不是线的颜色。
1.信号A相和信号B相为编码器脉冲输出端;
2.正反转切换的线我们直接用单片机的引脚3.3V电平控制,是完全没有问题的;
3.编码器供电接3.3V;
4.PWM接单片机的PWM输出,启动运行我们接单片机IO口,在电机初始化时置为高电平;
5.电源负极接GND,电源正极接12V。
项目中所使用,有点小贵,可以买便宜的。


将航模电池电压降至5V给单片机、舵机、蓝牙、超声波、电机编码器供电。

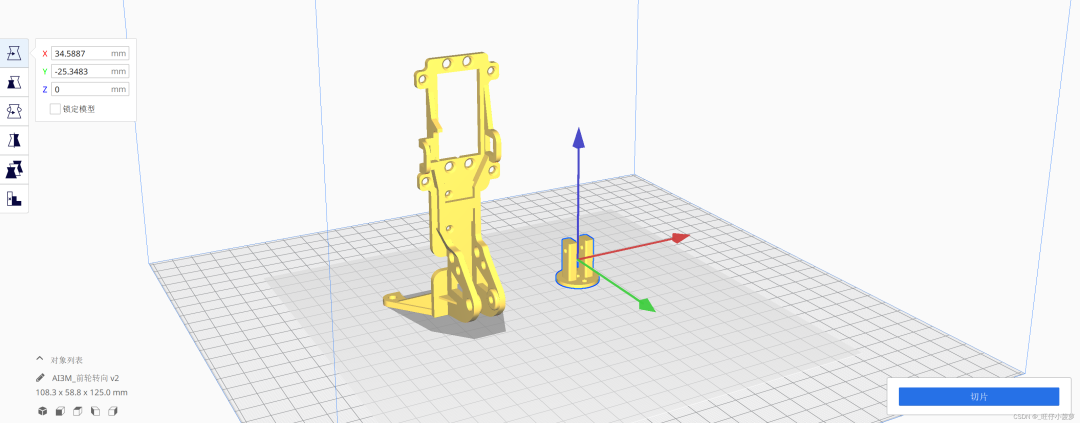
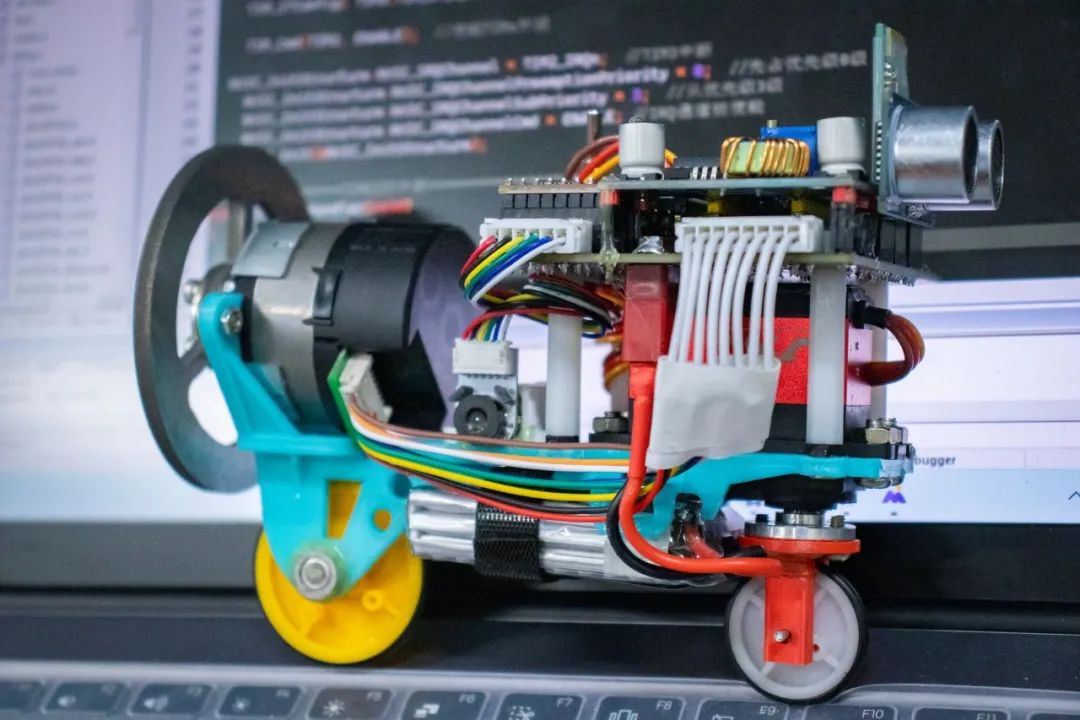
由于小车后轮是通过皮带传动,为减小摩擦,使后轮转动更加顺滑,需在后轮安装微型轴承。(轴承根据车轴尺寸购买)
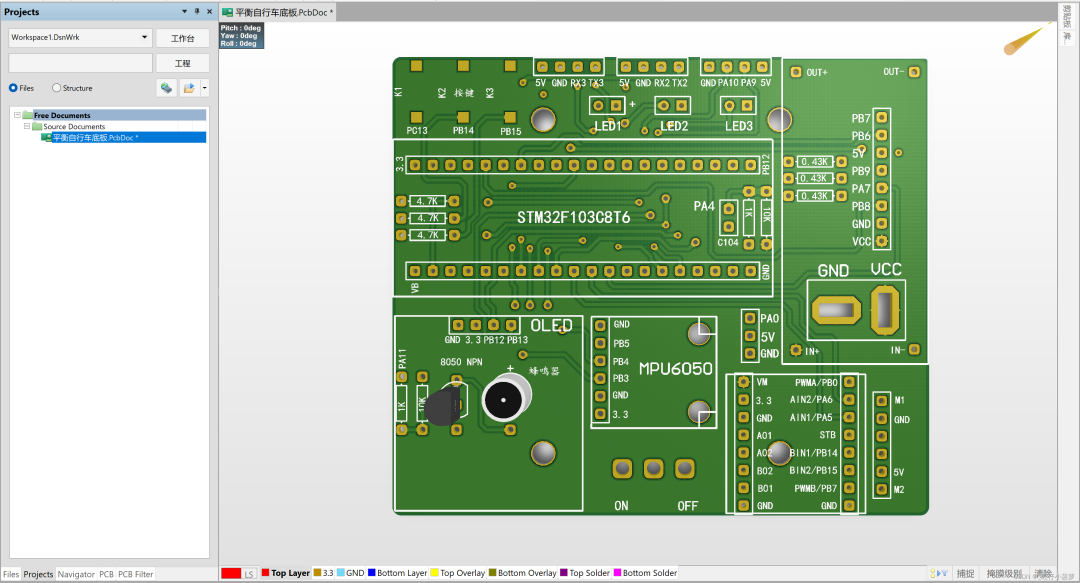
将上述功能模块集成在一块PCB电路板上(6.5x7.8cm),为方便焊接,电容电阻及三极管均为直插式元件。
02
#include "sys.h"float AdcValue; //电池电压数字量float Pitch,Roll,Yaw; //角度short aacx,aacy,aacz; //加速度传感器原始数据short gyrox,gyroy,gyroz; //陀螺仪原始数据int PWM1;int PWM_MAX=6500,PWM_MIN=-6500; //PWM限幅变量int Encoder_Motor; //编码器数据(速度)int main(void){NVIC_Config();delay_init();Led_Init();Beep_Init();Wave_SRD_Init();uart3_init(9600);OLED_Init(); //初始化OLEDOLED_Clear();adc_Init();MOTOR_1_Init();MOTOR_2_Init();PWM_Init_TIM3(7199,0);//定时器3初始化PWM 10KHZ,用于驱动动量轮电机PWM_Init_TIM2(9999, 143);//定时器2初始化PWM 50HZ,用于驱动舵机TIM_SetCompare1(TIM2, 790);//舵机复位Init_TIM1(9998,7199);Encoder_Init_TIM4(65535,0);OLED_ShowString(25,4,"MPU6050...",16);MPU_Init(); //MPU6050初始化while(mpu_dmp_init()){OLED_ShowString(25,4,"MPU6050 Error",16);}OLED_ShowString(25,4,"MPU6050 OK!",16);Beep=1;delay_ms(400);Beep=0;MPU6050_EXTI_Init();OLED_Clear();OLED_ShowString(0,0,"Roll : C",16);OLED_ShowString(0,3,"Speed: R ",16);OLED_ShowString(0,6,"Power: V ",16);while(1){Wave_SRD_Strat();AdcValue=11.09*(3.3*Get_adc_Average(ADC_Channel_4,10)/0x0fff); //ADC值范围为从0-2^12=4095(111111111111)一般情况下对应电压为0-3.3VOLED_Showdecimal(55,0,Roll,9,16);OLED_Showdecimal(55,3,Encoder_Motor*0.25,9,16);OLED_Showdecimal(50,6,AdcValue,9,16);}}
2.2 PID控制算法
学习视频:
该小车实现直立平衡需要用到两个闭环控制,即直立环(PD控制、负反馈),速度环(PI控制、正反馈),代码原理及调试过程与两轮平衡小车调试过程基本一致。
关于PID控制算法的学习,内容较多,不好详细展开,网上资源丰富,大家可自行学习。
这里推荐一篇知乎文章:https://zhuanlan.zhihu.com/p/39573490
#ifndef __SYS_H#define __SYS_H#include "stm32f10x.h"#include "adc.h"#include "oled.h"#include "led.h"#include "beep.h"#include "wave.h"#include "control.h"#include "exti.h"#include "mpu6050.h"#include "inv_mpu.h"#include "inv_mpu_dmp_motion_driver.h"#include "motor.h"#include "pwm.h"#include "encoder.h"#include "usart.h"#include "delay.h"#include#include
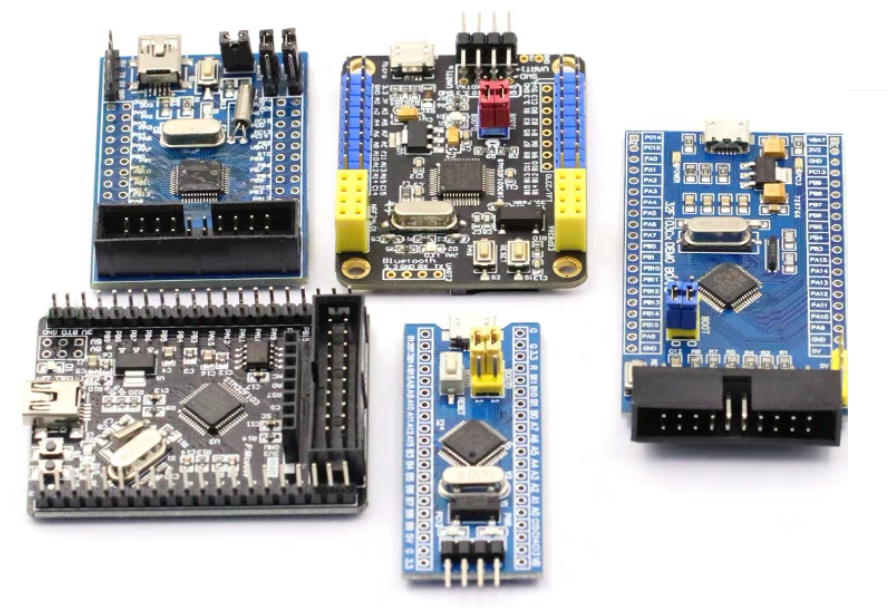
STM32F10x系列的MCU复位后,PA13/14/15 & PB3/4默认配置为JTAG功能。有时我们为了充分利用MCU I/O口的资源,会把这些端口设置为普通I/O口。
使用JLINK向STM32烧录程序时,需要使用6个芯片的引脚(以STM32F103C8T6为例),分别是PB4 / JNTRST,PB3 / JTDO,PA13 / JTMS,PA14 / JTCK,PA15 / JTDI,NRST。
当芯片IO口资源比较紧张时,可选择SW模式烧录程序。
SWD只需用到PA13 / JTMS,PA14 / JTCK两根线,NREST可以接可不接,剩下的PB4 / JNTRST,PB3 / JTDO和PA15 / JTDI就可以当然普通IO使用,但是这三个口当然普通IO使用时需要先进行如下配置。(这里MPU6050模块用到PB3和PB4引脚)
03
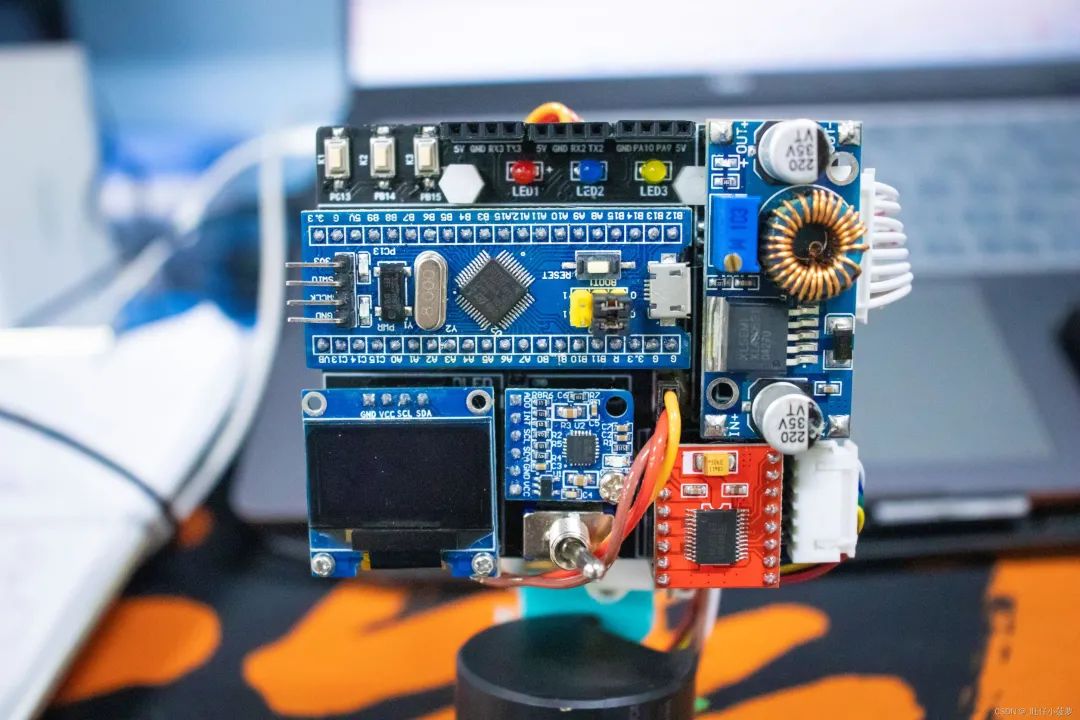
3.1 作品照片
3.2 获取方式
加入星球的同学,可以直接到星球内下载。
未加入星球的的同学,可以添加微信:great_xiaolong,加好友记得备注:自行车。
对了,借此推荐下知识星球,星球现在已有120+人加入,有兴趣加入的朋友可以添加上方微信咨询,现在加入有一定优惠。


-END-

一个亿的融资在一家芯片初创公司可以烧多久?

STM32为何在诸多的单片机中脱颖而出?

搞硬件,别吹牛了,好好做个规划!





