

源代码请见“阅读原文”哦~
项目介绍
本系统是为参加硬禾学堂联合Digi-Key发起的FastBond活动而设计的,活动规则是项目的板卡必须同时使用ADI和美信的产品实现相关功能。
本系统主要使用了ADI的ADXL345三轴加速度传感器模块、MAXIM的MAX7219点阵显示模块,来实现体感控制功能。
控制器采用Seeed公司的Seeeduino XIAO开发板,控制器采集ADXL345的加速度信息,当在Y轴方向转动开发板时,控制器根据加速度(倾角)的变化,控制MAX7219显示模块的显示内容动态变化。
硬件设计
系统用到的硬件如下表所示:

Seeeduino XIAO 开发板为Seeed公司产品,它体积小巧,接口丰富。主控芯片为ARM Cortex-M0+ CPU(SAMD21G18),主频高达 48MHz。它具有14个引脚,引脚可配置,根据配置不同,可提供11 digital/analog pins, 10 PWM Pins, 1 DAC output, 1 SWD, 1 I2C interface, 1 UART interface, 1 SPI interface等各种接口。Seeeduino XIAO 开发板为Seeed公司产品,它体积小巧,接口丰富。主控芯片为ARM Cortex-M0+ CPU(SAMD21G18),主频高达 48MHz。

ADXL345 是 ADI 公司推出的基于 iMEMS 技术的 3 轴、数字输出加速度传感器。该加速度传感器的特点有:
1、分辨率高。最高 13 位分辨率。
2、量程可变。具有+/-2g, +/-4g, +/-8g, +/-16g 可变的测量范围。
3、灵敏度高。最高达 3.9mg/LSB,能测量不到 1.0°的倾斜角度变化。
4、功耗低。40~145uA 的超低功耗,待机模式只有 0.1uA。/5、尺寸小。整个 IC 尺寸只有 3mm*5mm*1mm, LGA 封装。
为提高开发进度,在网上直接购买的电子积木成品,模块接口为I2C接口。

MAX7219 是美国 MAXIM 公司推出的多位LED显示驱动器,是一种集成化的 串行 输入/输出 共阴极 显示驱动器,采用 3线 串行接口传送数据,可直接与单片机接口连接,用户能方便修改其内部参数,以实现多位LED显示。它内含硬件动态扫描电路、BCD译码器、段驱动器和位驱动器。此外,其内部还含有8X8 位静态RAM,用于存放8 个数字的显示数据。
使用MAX7219,可以驱动8*8点阵或8个数码管。MAX7219与MCU相连的引线有三条:DIN、CLK、CS,可与SPI接口兼容。此次购买的电子积木套件散件 (含电路板),自行焊接完成。
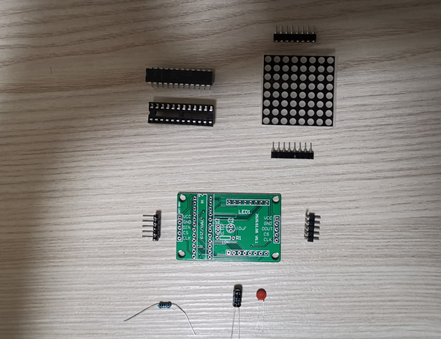
散件图
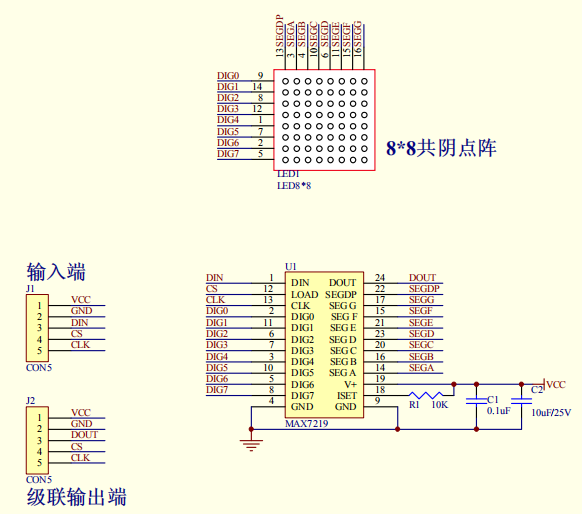
原理图
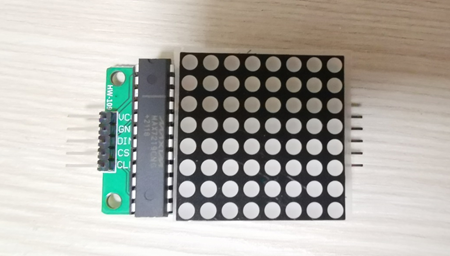
焊接完成
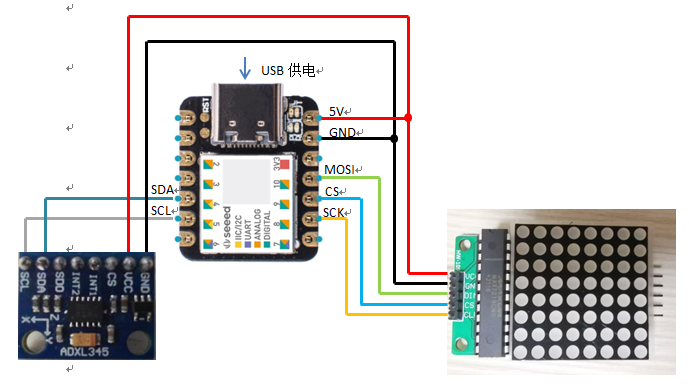
系统接线
软件设计
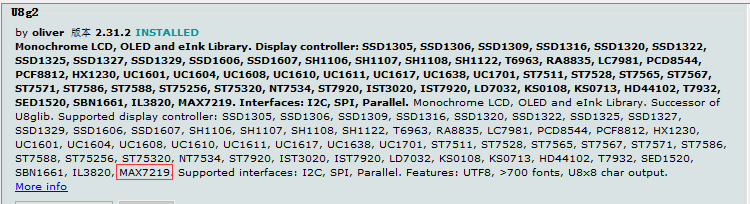
系统使用Arduino进行编程,主要用了Adafruit_ADXL345库和U8g2库,开发非常方便。

代码说明:
/* Assign a unique ID to this sensor at the same time */Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);U8G2_MAX7219_8X8_F_4W_SW_SPI u8g2(U8G2_R0, /* clock=*/ 8, /* data=*/ 10, /* cs=*/ 9, /* dc=*/ U8X8_PIN_NONE, /* reset=*/ U8X8_PIN_NONE);//引脚可以根据实际情况,自定义或指定,可以是代号或引脚号,如MOSI、SCK。void setup(void){Serial.begin(9600);Serial.println("Accelerometer Test"); Serial.println("");/* Initialise the sensor */if(!accel.begin()){/* There was a problem detecting the ADXL345 ... check your connections */Serial.println("Ooops, no ADXL345 detected ... Check your wiring!");while(1);}/* Set the range to whatever is appropriate for your project */accel.setRange(ADXL345_RANGE_16_G);// accel.setRange(ADXL345_RANGE_8_G);// accel.setRange(ADXL345_RANGE_4_G);// accel.setRange(ADXL345_RANGE_2_G);Serial.println("");u8g2.begin();}void loop(void){/* Get a new sensor event */sensors_event_t event;accel.getEvent(&event);/* Display the results (acceleration is measured in m/s^2) */Serial.print("X: "); Serial.print(event.acceleration.x); Serial.print(" ");Serial.print("Y: "); Serial.print(event.acceleration.y); Serial.print(" ");Serial.print("Z: "); Serial.print(event.acceleration.z); Serial.print(" ");Serial.println("m/s^2 ");delay(500);if (event.acceleration.y<=0){u8g2.clearBuffer(); // 清除缓存u8g2.setFont(u8g2_font_victoriabold8_8r);// 设置字体u8g2.drawStr(0,8,"I"); // 显示“I”u8g2.sendBuffer(); // 显示内容}if (event.acceleration.y>0 && event.acceleration.y<1){u8g2.clearBuffer(); // 清除缓存u8g2.setFont(u8g2_font_victoriabold8_8r);// 设置字体u8g2.drawStr(0,9-event.acceleration.y*8,"I"); // 显示“I”u8g2.sendBuffer(); // 显示内容}else if (event.acceleration.y>=1 && event.acceleration.y<2){u8g2.clearBuffer(); // 清除缓存u8g2.setFont(u8g2_font_open_iconic_human_1x_t); // 设置心形字体u8g2.drawGlyph(0,17-event.acceleration.y*8,66); // 64-时钟 65-箭头 66-心形u8g2.sendBuffer(); // 显示内容}else if (event.acceleration.y>=2 && event.acceleration.y<3){u8g2.clearBuffer(); // 清除缓存u8g2.setFont(u8g2_font_victoriabold8_8r);// 设置字体u8g2.drawStr(0,25-event.acceleration.y*8,"H"); // 显示“H”u8g2.sendBuffer(); // 显示内容}else if (event.acceleration.y>=3 && event.acceleration.y<4){u8g2.clearBuffer(); // 清除缓存u8g2.setFont(u8g2_font_victoriabold8_8r);// 设置字体u8g2.drawStr(0,33-event.acceleration.y*8,"B"); // 显示“B”u8g2.sendBuffer(); // 显示内容}else if (event.acceleration.y>=4 && event.acceleration.y<5){u8g2.clearBuffer(); // 清除缓存u8g2.setFont(u8g2_font_victoriabold8_8r);// 设置字体u8g2.drawStr(0,41-event.acceleration.y*8,"U"); // 显示“U”u8g2.sendBuffer(); // 显示内容}else if (event.acceleration.y>=5){u8g2.clearBuffer(); // 清除缓存u8g2.setFont(u8g2_font_p01type_tr);// 设置字体u8g2.drawStr(0,3,"1"); // 显示“1”u8g2.drawStr(2,5,"0"); // 显示“0”u8g2.drawStr(5,7,"0"); // 显示“0”u8g2.sendBuffer(); // 显示内容}}
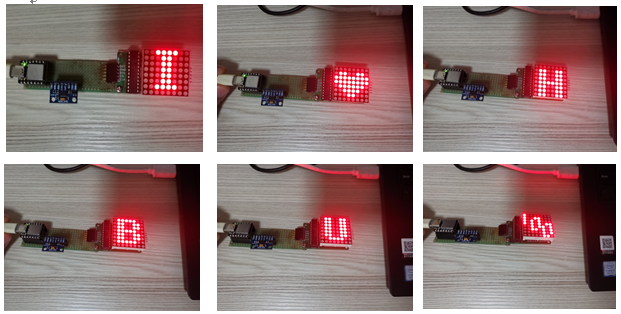
演示效果
电路板平放时,点阵显示I,当手捏住电路板,向上翻转时,会依次动态显示,I HBU 100, 为母校100周年校庆送上祝福。
项目介绍
1.报名时比较仓促,没有仔细选择芯片,导致得捷购买的芯片使用起来难度较大。如TMC4671芯片,封装引脚过密,对没有做个电路板设计的新手,使用和焊接难度较大。虽然官网有参考的开发板设计图,但该芯片调试还需要采购配套的USB下载器等,价格较高,最终放弃了该方案。
2.因工作原因,没有太多业余时间,原计划使用MAX32660开发板完成这个项目,并增加HC-05蓝牙模块,做一个体感遥控手柄。后来还是考虑加快调试速度,改为支持Arduino的开发板,仅完成了活动的基本要求。
3.因未仔细阅读芯片手册及开发板资料,开始将模块电源接到了开发板3.3V引脚,导致电流过大,损坏了开发板引脚,后改为5V引脚,还好开发板还能勉强工作。
4.免费的KiCad软件非常好,这次没有把教程学完,就用面板板焊接的硬件。多年来一直没有完整的学习电路板硬件设计,苏老师的课程内容非常丰富实用,后面一定加强学习。
END
硬禾学堂
硬禾团队一直致力于给电子工程师和相关专业的同学,带来规范的核心技能课程,帮助大家在学习和工作的各个阶段,都能有效地提升自己的职业能力。

硬禾学堂
我们一起在电子领域探索前进
关注硬禾服务号,随时直达课堂

点击阅读原文,获取全部资料~
