
来源 | 战术导弹技术
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
声明 | 本号聚焦相关知识分享,内容观点不代表本号立场,可追溯内容均注明来源,若存在版权等问题,请联系(15881101905,微信同号)删除,谢谢。




摘要:空空导弹一体化仿真系统可为未来雷达型和红外型空空导弹武器系统研究、开发、试验验证提供一体化仿真环境,是未来武器装备仿真试验的发展趋势。首先,从一体化仿真系统的适用对象范围、试验模式和能力覆盖范围三个方面进行需求分析;其次,综述了系统总体架构两个层面的特点,概述了基于仿真系统构建的一体化仿真系统总体架构工作原理及各分系统功能原理;然后,针对包括远距离智能I/O接口技术、一体化仿真系统时钟统一技术在内的一体化仿真关键技术,分析梳理了其基本设计方法。最后,通过构建典型的空空导弹武器一体化仿真系统验证了总体架构可行性以及关键技术实现的正确性。
关键词:空空导弹;一体化仿真;仿真系统;全弹性能考核;总体架构
1 引言
随着科技发展,现代战争已经不再是单机对单机、编队对编队的对撞式战争,而利用信息技术将整个战场的各种火力、平台、控制、探测等节点有效集成的战场体系,是体系与体系的对抗。以美国为首的西方国家在争夺制空权方面具有传统优势,特别是近年来美国一直在努力整合赛博空间和电磁空间的优势,催生了集成度更高的制空作战体系。在这种体系下,任何单个武器的挑战均不会构成威胁,只能是体系对抗体系。
在空空导弹武器系统研制中,导弹总体武器系统性能测试、制导系统半实物仿真、引战配合仿真等都是重要的试验验证手段,分别用于武器系统性能测试、导弹制导系统性能评定、引战配合效果与毁伤效能评估。传统的制导半实物仿真实验室通常都是分布式的单弹制导半实物仿真实验室,仿真与试验系统一般都是根据专业划分为不同部分,试验系统之间无直接的交互,不利于对武器系统综合性能进行整体评价。
根据武器装备仿真试验“全系统、全流程、全剖面、一体化”的需求和发展趋势,对上述主要仿真试验系统资源、设备进行整合设计,构建出空空导弹武器一体化仿真系统,能够为在研和未来雷达型和红外型空空导弹武器系统研究、开发、试验验证提供一体化仿真环境。将机载武器系统仿真实验室、雷达制导控制系统半实物仿真实验室、红外制导控制系统半实物仿真实验室和引战配合仿真实验室等多个分散、独立的子系统进行互连,实现多个子系统的协同工作,实现一体化仿真。
针对构建空空导弹武器一体化仿真系统的需求,以现有机载武器系统机弹数据交互模拟系统、雷达/红外制导半实物仿真系统及引战配合仿真系统等试验系统为基础,利用高速数据网络技术、高精度时钟同步系统,将多个分散、独立的子系统进行互连,通过时间和事件混合驱动实现多个子系统的协同工作,为空空导弹武器一体化仿真验证提供基础,支撑复杂装备一体化实时仿真平台构建和实现。
2 需求分析
一体化仿真系统的总体设计与一般的仿真系统不同,一体化仿真系统的总体设计具有针对性更强、系统复杂程度更高、规划性更远的特点,对于仿真时间同步、信息传输实时性、远距离信息传输等需求明确。为了做好系统的总体顶层设计,首先需对系统总体的任务和目标进行深入分析。本文从一体化仿真系统的适用对象范围、试验模式和能力覆盖范围三个方面进行分析,将系统设计目的和设计目标融入系统总体设计,在满足当前需求的同时,具有更好的兼容性和扩展性,便于未来仿真系统能力的提升和拓展。
2.1 适应对象分析
一体化仿真系统设计中,适用的武器系统发射平台主要是机载发射平台,同时可兼顾地面车载发射平台,制导武器末制导方式主要包括雷达制导和红外成像制导。
(1)适应多武器发射平台
地面车载发射平台主要适用于由空空导弹派生而来的地空导弹系统。不同的武器发射平台对系统的要求重点体现在火控系统、发控系统的模拟设计上。机载发射平台的火控系统数字总线以1553B、ARINC429为主,地面车载发射平台的火控系统数字总线以CAN、RS422为主,一体化仿真系统在信息接口的设计上要能够兼顾多火控总线类型的模拟需求。同时在火发控时序控制上,不同的发射平台差异较大,在火发控系统模拟设计时按武器发射平台进行分类,对相应武器平台的ICD文件进行识别,以兼顾两类典型发射平台的时序及接口模拟需求。
(2)适应多制导武器
为保证一体化仿真系统可适应不同型号的制导武器,应重点在供电特性、信息交互的实时性、信息交互形式、运动特性模拟、仿真周期、模型计算规模、仿真模式需求、目标及环境特性模拟、信息接口通用化/模块化设计等方面进行综合考虑。
(3)适应多制导方式
当前空空导弹的末制导方式主要为雷达制导与红外成像制导。多制导方式的需求主要体现在对导弹中制导的仿真。目前空空导弹、地空导弹典型的中制导方式包括:卫星导航+数据链+捷联惯导方式、数据链+捷联惯导方式、卫星导航+捷联惯导方式等,因此在系统总体设计时,要考虑没有数据链模拟器和卫星信号模拟器情况下中制导仿真的实现方式。目前制导武器中制导仿真一般有两种,一种是中制导信息注入的方式,该方式的特点是成本低、系统构建灵活、适应性强;难点是注入信息的实时性及同步处理;另一种是采用数据链模拟器、卫星信号模拟器来模拟数据链信息和卫星导航信息,但需要专门研制相应的模拟器。
2.2 试验模式分析
为了一体化仿真系统实现多弹协同制导仿真,可以重点考虑在制导半实物仿真内采用基于导引头模型的导引信号注入方式来实现。该方法在工程上的可实现性更强,技术成熟,成本也最低。但是在性能考核方面,受导引头建模程度的限制,无法全面考核导引头的性能,其中包括导引头的探测、跟踪、识别、抗干扰等性能。这种实现模式可以实现对协同制导算法的研究验证,对多弹道协同控制算法及信息融合算法的研究验证。
2.3 能力覆盖范围分析
一体化仿真系统能力覆盖范围包括:单弹的精度仿真(典型和极限边界条件、抗干扰性能仿真、复杂环境适应性仿真)、多弹的协同精度仿真(暂只考虑典型条件)等仿真能力。
(1)单弹精度仿真
单弹精度仿真是一体化仿真系统的典型应用模式,这一需求对一体化仿真系统的要求就是如何将机载武器发射仿真系统、制导半实物仿真系统及引战配合仿真系统以一定形式结合起来,需要重点考虑试验系统互联技术、网络中间件技术及时钟同步系统技术。
(2)多弹协同精度仿真
多弹协同精度仿真是基于单弹精度仿真设计,要求机载武器发射仿真系统、制导半实物仿真及引战配合仿真系统具备多导弹仿真能力,具备多弹协同建模、多弹数据实时性交互技术。
3 一体化仿真系统总体架构设计
一体化仿真系统架构总体设计时首先考虑实时仿真运行指挥调度、仿真成员数据交互机制、高速实时通讯网络、复杂系统的时间统一等设计问题,设计空空导弹武器一体化仿真系统总体框架,满足空空导弹武器一体化仿真系统的构建需求。系统总体构建可从两个层面进行:一方面是系统架构层面,主要是以智能网关+实时网络为系统总体组网架构,基于中间件的数据发布订阅通讯机制,以此来组建一体化仿真系统;另一个方面是仿真系统的构成层面,明确了系统由机载武器发射仿真系统、制导半实物仿真系统、引战配合仿真系统及时钟同步系统组成。
基于智能网关+实时网络的系统总体组网架构,采用基于中间件的数据发布订阅通讯机制,来实现整个系统的数据交互。这种架构设计是实现系统模块化设计、系统兼容性和扩展性设计、构建多粒度的组合仿真模式、便捷的系统信息交互及系统综合指挥控制管理的关键。在这种系统总体物理架构的基础上,满足系统具体应用需求要考虑的设计重点是实现仿真信息流交互的实时性、同步性、灵活性及可靠性。
基于仿真系统构建总体架构,从空空导弹全弹性能考核目的出发,确定好各个试验系统的输入、输出数据衔接,借助时钟同步系统、远距离智能I/O接口系统和智能网关系统,实现机载武器仿真系统、制导半实物仿真系统、引战配合仿真系统间的同步、互联,实现一体化仿真。此架构设计基于现有试验系统进行,对现有系统的更改较少,所需经费较少,本文针对此架构进行阐述。
基于仿真系统构建的一体化仿真系统工作过程如下:首先采用空空导弹机载武器发射模拟系统,完成导弹在架状态的功能测试,接受试验测试平台下发的飞行任务,构造出弹目之间的攻击态势,然后采用雷达/红外空空导弹制导半实物仿真系统,以弹目之间攻击态势相关参数作为输入,产生相应的场景模型,驱动仿真设备的运行,完成导弹程控段+中制导段+末制导段响应态势的仿真,得到末端弹目交会仿真条件和态势,最后采用空空导弹引战配合仿真系统,以制导控制系统半实物仿真结果作为交会仿真的输入条件,完成导弹引战配合模拟和战斗损伤模拟,计算得到目标损伤情况。在系统工作过程中,设计远距离智能I/O接口系统、智能网关系统,完成试验系统关键信号的高速、远距离交互以及多个试验系统组网互联,采用高精度时钟系统,实现多个试验系统时钟同步。
基于仿真系统构建的一体化仿真系统组成如图1所示。
图1 一体化仿真系统组成
3.1 武器发射模拟系统
为满足现在和未来导弹系统研制需求,机载武器发射仿真系统设计时不针对某型飞机系统,而是采用通用化设计,由通用机载光电雷达模拟器、通用机载惯导模拟器、通用机载火控模拟器、通用机载大气机模拟器、通用机载雷达模拟器和外挂物管理模拟器组成,形成通用化的ICD、POP以及详细系统工作时序等顶层文件,能够模拟完成飞机要求的各种导航、探测和攻击任务,提供飞行员人机交互界面;同时通过启动不同的过程处理完成不同的任务和功能,模拟地面准备工作模式、导航工作模式、空空格斗工作模式、空空拦截工作模式以及维护工作模式等。
针对一体化仿真系统设计需求,机载武器发射仿真系统应进行如下任务分配。
(1)火控信号模拟设计
火控信号模拟设计是实现一体化仿真的关键,方案设计中要考虑多种火控总线接口类型,主要包括1553B、ARINC429、CAN和RS422总线,同时控制时序设计上也要考虑多控制时序需求。可以按武器类型、接口类型、参试对象类型等进行配置和选择。
(2)下发飞行任务的实时性
为了适应一体化仿真需求,机载武器发射模拟系统设计时要重点考虑与其它子系统的信息交互接口。信息交互接口主要包括智能网关和远距离智能I/O接口。设计中通过智能网关实现大量实时光纤信息的交互,通过远距离智能I/O接口来实现飞行任务电信号的远距离交互。
3.2 制导半实物仿真系统
制导半实物仿真系统分为雷达型制导半实物仿真系统和红外型制导半实物仿真系统,主要包括:任务调度系统、仿真计算平台、三轴转台、毫米波/红外目标信号源以及卫星信号模拟器等。为了在一套制导半实物仿真系统内实现多弹协同制导仿真,可以采用基于导引头模型的导引信号注入方式来实现。该方法技术成熟、工程上的可实现性更强、成本也最低。以红外制导半实物仿真系统为例,在仿真前端适配器的输出端设计仿真部件模拟专用输出接口,通过设计3组飞控部件模拟接口来覆盖1主3从的多弹协同系统仿真能力,多弹系统制导仿真试验仿真资源分配情况如表1所示。在现有系统总体框架设计基础上,基于系统仿真资源构建多弹协同制导仿真系统,试验原理如图2所示。
表1 多弹协同制导仿真试验仿真资源分配情况表
试验模式 | 参试部件 | 参试仿真成员 |
多弹协同制导仿真试验模式 | 制导控制舱段(1发)、飞控部件(3发) | 总控制台节点、飞控遥测采集节点、导引头图像及遥测采集节点、目标模拟器节点、仿真部件模拟节点、舵机负载模拟器节点、仿真计算机节点、五轴转台节点 |
表2 参试仿真成员功能表
序号 | 参试仿真节点 | 参试仿真节点功能 |
1 | 总控制台节点 | 完成接收多弹协同飞行任务下发、人机交互、安全管理、时钟同步控制、数据可视化 |
2 | 飞控遥测采集节点 | 完成主弹和从弹飞控遥测数据采集及处理 |
3 | 导引头图像及遥测节点 | 完成主弹导引头图像和遥测数据采集 |
4 | 红外目标模拟系统节点 | 完成红外场景图像的模拟 |
5 | 仿真部件模拟节点 | 完成主弹加速度计注入和其它传感器(卫星、数据链等)信息交互时序控制、数据交互模拟;完成从弹的飞控和导引头、飞控和舵机、飞控和惯导组件、其它传感器(卫星、数据链等)信息交互时序控制、数据交互模拟 |
6 | 舵机负载模拟器节点 | 完成主弹舵机铰链力矩的加载和加载状态下舵偏角信息采集 |
7 | I/O接口交互节点 | 完成主弹加速度计注入和其它传感器(卫星、数据链等)信息交互时序控制、数据交互模拟;完成从弹的飞控和导引头、飞控和舵机、飞控和惯导组件、其它传感器(卫星、数据链等)信息交互时序控制、数据交互模拟 |
8 | 仿真计算机节点 | 通过多核分别解算主弹和从弹的数学模型 |
9 | 五轴转台节点 | 完成主弹姿态运动和主弹弹目视线运动的模拟 |
通过舱段闭环仿真专用电缆将主弹制导控制舱段接入仿真系统,通过飞控部件闭环仿真专用电缆将从弹飞控部件接入仿真系统,从弹的传感器由数学模型来代替,协同仿真模式下各参试仿真成员的功能如表2所示。
在一套仿真系统内采用基于目标特性注入模式的多弹协同仿真,从性能考核逼真度方面相对于上述方法有了较大程度的提高。主要实现在性能考核方面,除了导引头探测性能考核无法覆盖外,全面覆盖了对导引头跟踪、识别、抗干扰等性能的考核,对协同制导仿真能力有巨大提升。
图2 多弹协同制导仿真系统的试验原理图
3.3 引战配合仿真系统
引战配合仿真系统主要由以下系统构成:引信交会仿真计算机、引信启动特性与引战配合数字仿真计算机、战斗部杀伤效能仿真计算机。针对一体化仿真系统设计要求,引战配合仿真系统在现有设计基础上重点进行如下适应性设计。
引战配合仿真系统首先根据接收的末端弹目交汇态势,分解制定引信对不同目标的交会条件(脱靶量、脱靶方位、交会角、相对速度等)。通过引信交会仿真试验,获得引信在不同交会条件下,对不同目标的启动特性(引信作用点、启动概率、作用距离等)。交会仿真试验得到的引信启动特性数据,作为引信启动特性与引战配合数字仿真中引信数字模型的修模与验模,再结合引战配合模型,引战配合数字仿真计算机可以计算出炸点坐标。获得了炸点坐标以及交会条件后,战斗部杀伤效能计算机通过目标易损性模型和战斗部杀伤模型,计算得到战斗部条件杀伤概率,工作流程如图3所示。
图3 引战配合仿真系统工作流程
上述引战交会仿真系统适应性更改是针对单枚导弹的杀伤概率计算而设计的,针对多弹协同情况下的杀伤概率计算,由于战斗部杀伤效能模型比较复杂,同时输入多枚导弹末端攻击态势进行计算的时间较长,可采用对一枚导弹进行杀伤概率计算,其他导弹采用简化杀伤模型进行仿真计算的方式。
3.4 远距离智能I/O接口
智能I/O接口单元的研究主要是解决目前武器系统仿真过程中面临的仿真对象之间或仿真对象与仿真系统中各分布式节点间通讯及数据采集的实时性问题、信号的远距离传输问题及适应仿真对象复杂的工作时序问题,通过完成智能I/O接口设计来满足目前标准的分布式I/O接口越来越难以实现的复杂仿真系统的构建需求。
3.5 高速数据网络系统
一体化仿真系统中各子系统属于不同专业的独立试验系统,相互之间距离较远,因此实现各子系统远程实时通讯互联是构建一体化仿真系统的基础。高速数据网络系统以智能网关为核心,可实现多个光纤子网的远程或近距离实时互联。由于智能网关中用于远程互联的单模光纤接口采用SFP可拔插形式,可方便地更换为多模光纤SFP模块,因此也支持近距离光纤子网的互联或者级联。智能网关是支撑整个一体化仿真系统各仿真子网互通互联的关键。
3.6 时钟同步系统
一体化仿真系统中各子系统是独立的系统,同时各子系统内的计算机采用异步通讯。在进行一体化仿真设计时,采用高精度时钟同步系统,为各仿真设备的运行提供时间基准,实现多个仿真系统之间的时间同步与时序协调控制。时钟同步系统主要包括卫星授时终端、时钟卡等。
4 一体化仿真关键技术
4.1 远距离智能I/O接口设计
为了解决信号远距传输导致的信号完整性问题,智能I/O接口单元和仿真节点间的通讯通过光纤接口实现,在I/O接口板上设计高速光纤口。
信号传输的实时性主要从两个方面解决,一方面从I/O接口数据的获取方式层面上采用光纤通讯方式,另一方面从信号传输转换层面避开Windows操作系统,通过FPGA直接实现信号逻辑时序控制和转换。
智能I/O接口系统属于强实时性嵌入式处理系统,涉及的电口形式多、接口类型多、数量多,同时技术需求对于处理时间、延时都有着比较苛刻的要求。因此智能I/O接口系统采用了基于FPGA的可扩展技术思路,在具体处理技术手段上主要采用Verilog语言编程实现,以确保其快速性和低延时。
整个智能I/O接口设计包括母板、光纤转换模块以及子板1~4,其组成结构如图4所示。
图4 智能I/O接口结构示意图
智能I/O接口系统总体架构采用了母板(载板)+子板的方式。母板用于实现反射内存网络的实时通讯、数据分发以及1553B通道,各子板用于实现各类具体的电口功能。方案中借鉴了XMC的结构,各个子板的结构形式与尺寸均采用XMC子板的相关标准。
母板(载板)主要包括以下组成部分:
(1)主FPGA最小系统:实现光纤数据接收和发送、各子板和1553B通道高速串行数据的分发和汇总,是整板的核心。
(2)板载缓存单元:配合反射内存网络共享内存的工作。
(3)百兆以太网单元:用于对系统的工作模式进行配置和监控。
(4)光纤接口单元:兼顾兼容性和扩展性,本光纤接口单元设计了2.125G和高速两个SFP接口通道。
(5)1553B通道单元:由于母板(载板)尺寸空间有限,扩展的子板数量有限,因此将1553B通道设计布置在母板上。
(6)电源单元:为整板提供各种DC直流电源。
方案中通过母板上的4个子板接口扩展了4种不同种类的子板,各子板通道功能划分如表3所示。
表3 子板的通道功能划分
子板名称 | 电口通道种类 | 电口通道数量 | 备注说明 | |
子板1 | ARINC429接口 | 4收+4发 | ||
子板1 | 脉冲 | 加速度 | 6发 | 5 V TTL电平 |
角速度 | 6发 | 5 V TTL电平 | ||
同步信号 | 1收 | 5 V TTL电平 | ||
子板2 | RS232接口 | 2收+2发 | 非隔离 | |
RS422接口 | 8收+8发 | 非隔离 | ||
子板3 | LVDS接口 | 4收+4发 | ||
开关量 | 输出 | 8发 | 4路TTL,4路OC门 | |
输入 | 4收 | 5 V TTL | ||
子板4 | 模拟输入 | 4收 | 电压幅值:±10 V 分辨率:12位 | |
模拟输出 | 4发 | 电压幅值:±10 V 分辨率:12位 | ||
该设计通过选择单模光纤SFP器件实现信号的远距离传输,在控制信号传输延时设计上采用了优化固件程序和多位宽FIFO流水操作的设计思路,实现了复杂电信号的集成与融合,工程上可实现性较好,满足了项目使用需求。
4.2 一体化仿真系统时钟统一性设计
时统系统可以接收GPS/北斗信号,解码产生基准绝对时间,也可以利用B码输入信号,产生系统时间,时统终端子系统可以通过IRIG-B码传输实现与其它时统设备对时,输出绝对时间码及各种频率同步脉冲信号,输出给各个试验设备。
时钟同步系统采取接口关系如图5所示,时统终端子系统主要完成接收卫星B码信号,为系统提供绝对时间及同步触发信号。
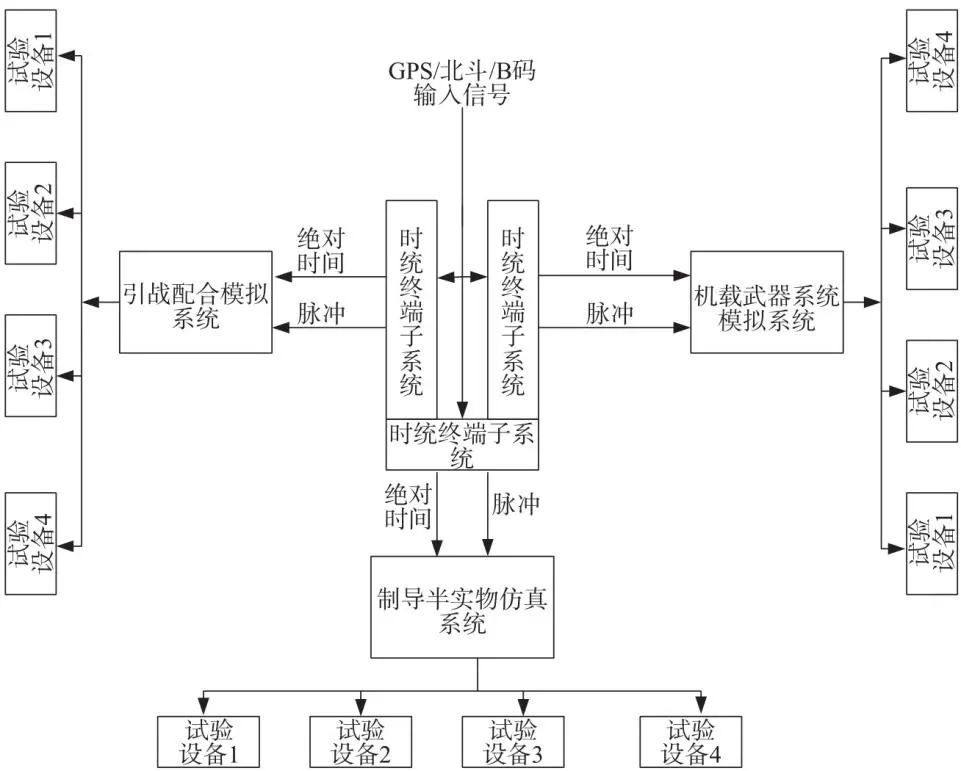
图5 时钟同步系统结构框图
时统终端子系统包括时间服务器与嵌入式授时板卡两种产品形态,其架构如图6所示,其中时间服务器负责接收卫星时间、对时间进行保持与守时的工作,嵌入式授时板卡负责接收时间服务器送出的标准时间,处理后通过标准PCI-e接口为PC机、服务器等设计提供标准时间。
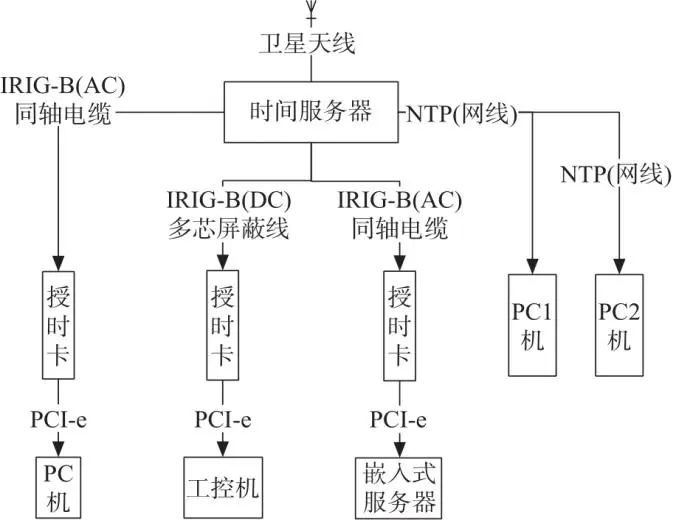
图6 时间服务器架构图
5 当前应用验证情况
综合考虑研制经费以及试验验证需求,在一体化仿真系统总体架构进行项目验证时,研制了一套智能I/O接口样机和若干套光纤转换接口板,利用智能I/O接口样机、光纤转换接口板,基于现有的机载数据交互功能模拟分系统、引战数据交互功能模拟分系统、雷达制导控制半实物仿真分系统和红外制导控制半实物仿真分系统这四个分系统来构建远距离数据交互链路。按照第3节中的设计方案进行验证系统构建时,以空空导弹一体化仿真系统总体架构设计为基础,根据接口验证需要将各接口分配到不同的分系统中来构建一体化仿真模式,从而实现在空空导弹一体化功能模拟平台上对智能I/O接口样机不同接口的仿真验证,构建的空空导弹一体化仿真接口验证系统原理如图7所示。
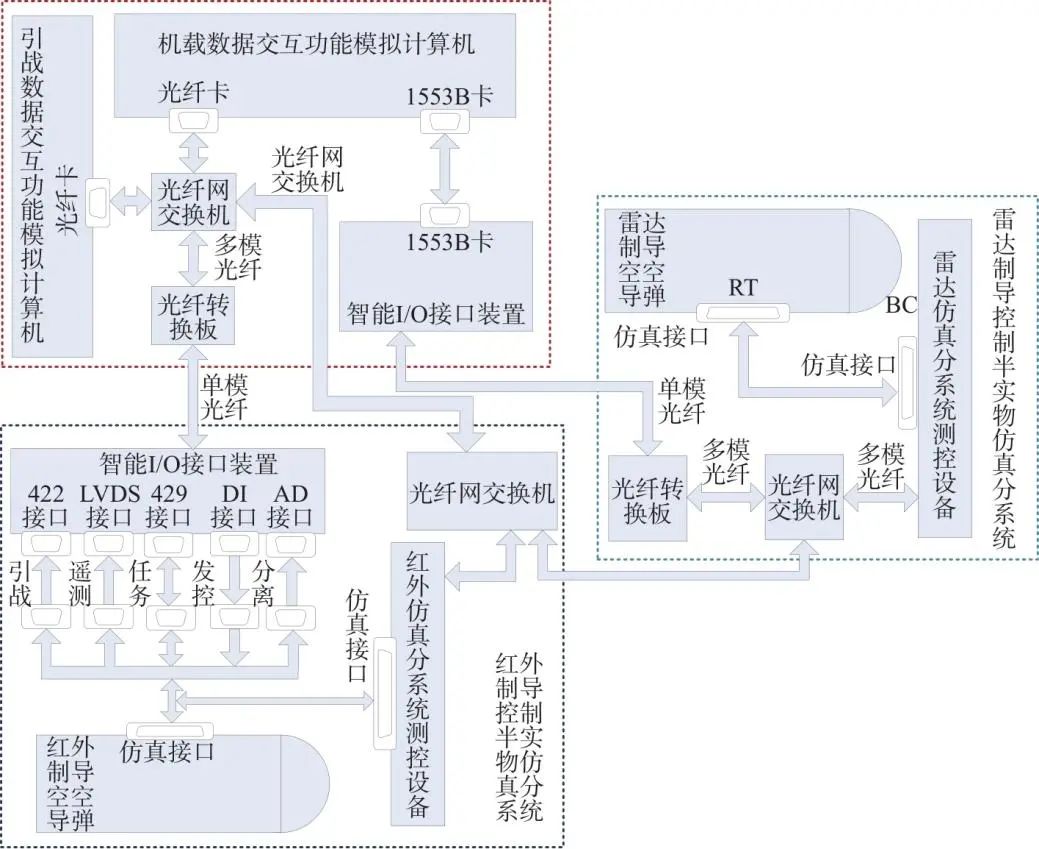
图7 空空导弹一体化仿真接口验证系统原理
5.1 仿真工程创建
通过机载数据交互功能模拟分系统创建空空导弹一体化仿真应用工程文件,通过光纤向各仿真节点下发仿真任务部署信息。
5.2 试验过程控制
(1)任务设置
根据某红外空空导弹和某雷达空空导弹工作周期,分别设定其仿真帧周期为0.625ms和1ms。部署完毕后,机载数据交互功能模拟分系统控制给红外制导控制分系统和雷达制导控制分系统产品上电,并通过仿真实时总线、接口适配总线下发飞行任务信息,进行仿真。
(2)仿真时序同步协调机制
要完成系统闭合验证试验,各参试设备必须进行严格的仿真时序控制。以仿真系统运行帧周期为时序控制步调,各参试设备按照设计的时序工作,所有数据交互通过实时仿真总线完成,仿真设备在帧周期的起始点读取光纤数据并用于各设备控制(智能I/O作为光纤实时网络的节点,实现光电和电光信号的转发)。
(3)试验过程
试验过程设计基于导弹的工作时序完成,由机载数据交互功能模拟分系统控制将攻击态势信息、参试导弹数量、目标信息等通过实时仿真总线下发,然后根据仿真起始指令,进行仿真节点的时序控制和状态反馈监视。仿真过程中,雷达仿真分系统通过实时仿真总线将目标信息发送给红外仿真系统,完成弹间数据链通信模拟;在每个仿真帧周期中,雷达仿真分系统将导弹位置、目标位置、导弹姿态、目标姿态等信息通过实时仿真总线发送给引战数据交互功能模拟分系统,引战数据交互功能模拟分系统根据输入数据进行模型计算,在弹道末端给出引战仿真结果。
在硬件资源有限的条件下,依据图7构建典型的简易空空导弹的一体化仿真系统,方案可行,实现了对一体化仿真中的关键内容——远距离信息实时交互、集成化的I/O接口设计、弹间信息交互等的充分验证。
6 结束语
本文依据复杂装备实时仿真支撑平台技术的技术需求,以现有的机载武器系统模拟系统、制导半实物仿真以及引战配合仿真系统为基础,设计了适应空空导弹武器一体化仿真需求的仿真系统架构,通过构建典型的简易空空导弹一体化仿真系统,并通过战术方案想定、试验条件设定、仿真模型部署、通讯协议调试、回路闭环仿真等过程,完成典型仿真系统的验证试验。试验过程及结果表明,空空导弹一体化仿真架构设计可行,能够满足空空导弹一体化仿真过程中仿真模型实时解算及高速、远距离、多电气接口格式的信息实时交互和弹间协同信息交互需求。
在典型一体化仿真系统验证时,由于经费有限,未将时统系统引入系统闭环验证,后续条件允许的情况下,需研制时统系统,为整个一体化仿真系统提供标准时间和同步触发基准,实现完整的一体化仿真系统。
通讯作者:山清,硕士研究生,主要研究方向为红外制导武器仿真设计。
引用格式:山清,吴根水,王艳奎,等.空空导弹一体化仿真系统总体架构及关键技术研究[J].战术导弹技术,2021,(5):1-10.(Citation:ShanQing,WuGenshui,WangYankui,et al. Research on the Overall Architecture and Key Technologies of Airbome Missile Integrated Simulation System[J].Tactical Missile Technology,2021,(5):1-10.)
来源|《战术导弹技术》2021年第5期
- The End -
声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!
