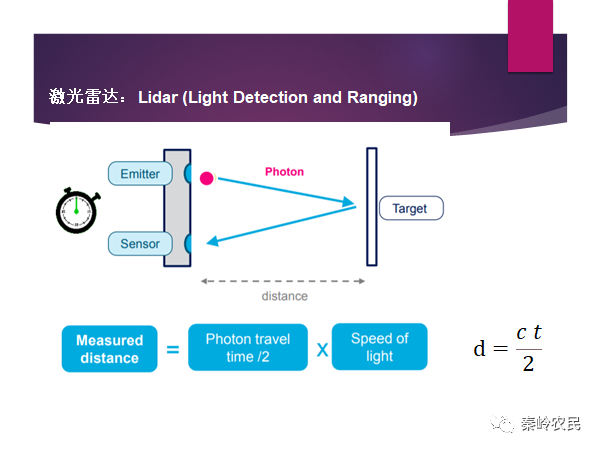
激光雷达(英文:Laser Radar),是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
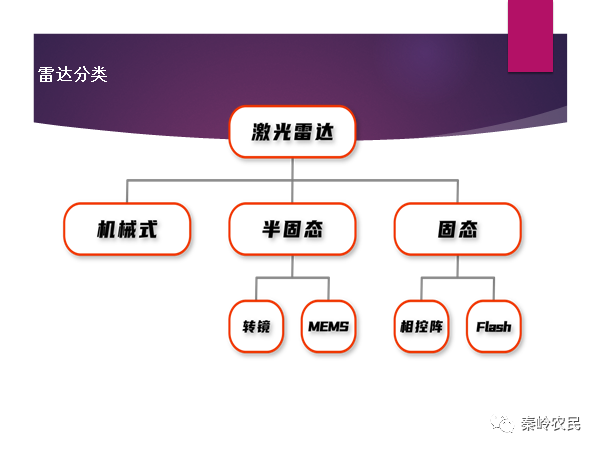
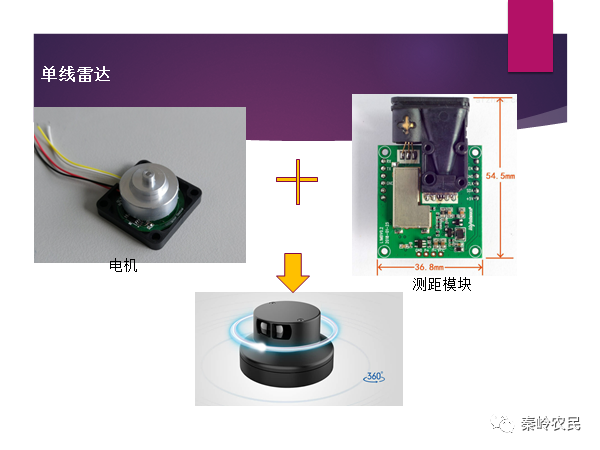
激光雷达分类多种多样,比如按发射波形可分为脉冲型和连续型;按探测方式可分为直接探测和相干探测;按线束可分为单线和多线等
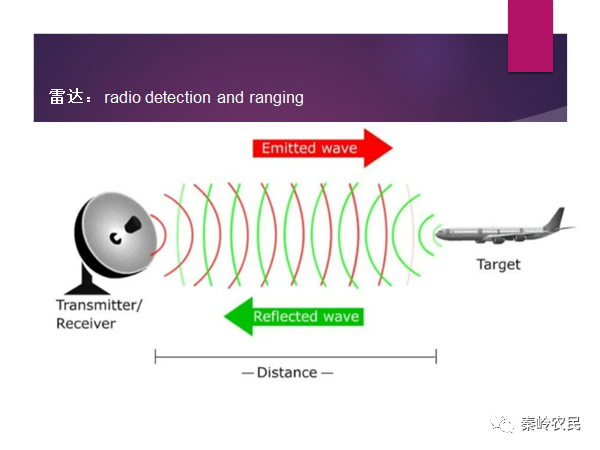
雷达,是英文Radar的音译,源于radio detection and ranging的缩写,意思为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。
激光雷达基本原理
半导体二极管激光器是最实用最重要的一类激光器。它体积小、寿命长,并可采用简单的注入电流的方式来泵浦,其工作电压和电流与集成电路兼容,因而可与之单片集成。并且还可以用高达GHz的频率直接进行电流调制以获得高速调制的激光输出。由于这些优点,半导体二极管激光器在激光通信、光存储、光陀螺、激光打印、测距以及雷达等方面得到了广泛的应用。

光电探测器能把光信号转换为电信号。根据器件对辐射响应的方式不同或者说器件工作的机理不同,光电探测器可分为两大类:一类是光子探测器;另一类是热探测器。

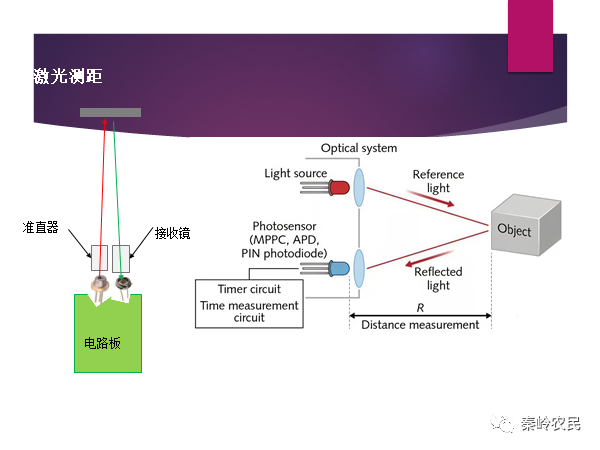
激光测距(laser distance measuring)是以激光器作为光源进行测距

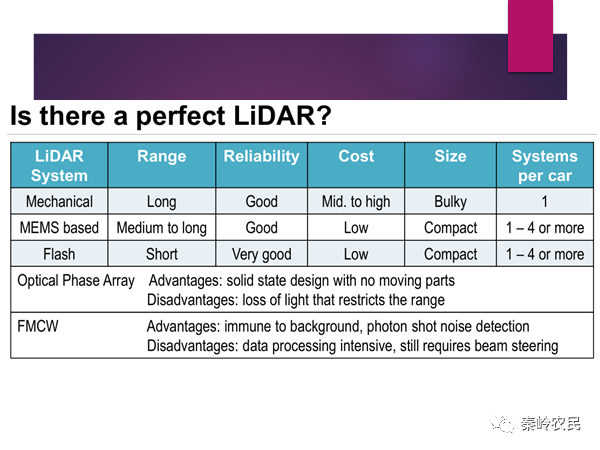
单线激光雷达主要用于规避障碍物,其扫描速度快、分辨率强、可靠性高。由于单线激光雷达比多线和3D激光雷达在角频率和灵敏度反映更加快捷,所以,在测试周围障碍物的距离和精度上都更加精 确。但是,单线雷达只能平面式扫描,不能测量物体高度,有一定局限性。当前主要应用于服务机器人身上,如我们常见的扫地机器人。
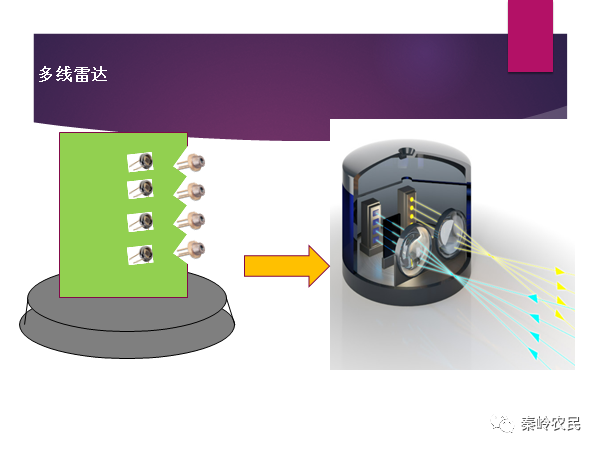
多线激光雷达主要应用于汽车的雷达成像,相比单线激光雷达在维度提升和场景还原上有了质的改变,可以识别物体的高度信息。多线激光雷达常规是2.5D,而且可以做到3D。目前在国际市场上推出的主要有 4线、8线、16 线、32 线和 64 线
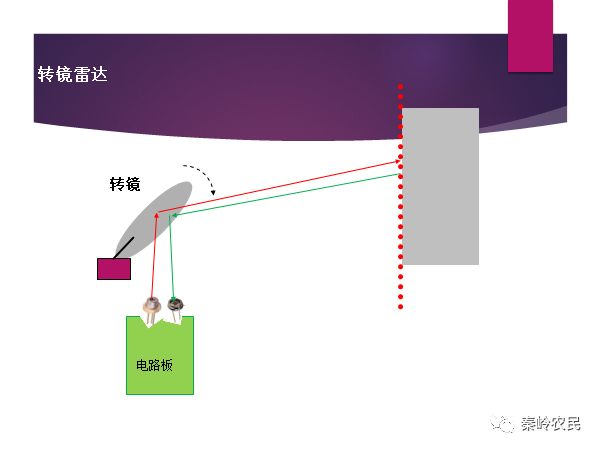
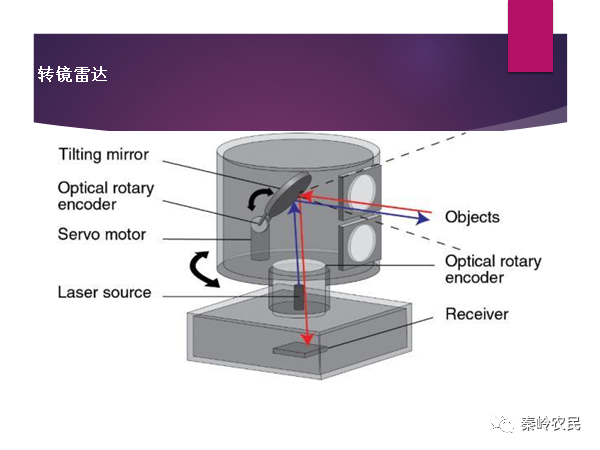
为了解决机械旋转式激光雷达的问题,激光雷达厂商对内部结构进行了优化,通过内部的转镜反射光线来实现扫描,被称作机械转镜式激光雷达,这样可以避免激光发射器运动所引起的问题
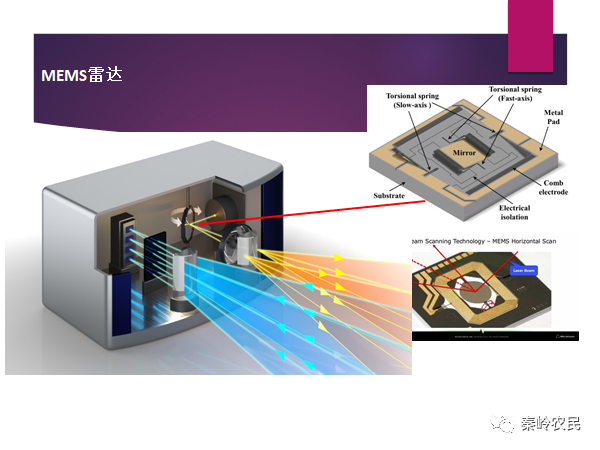
MEMS LiDAR,采用MEMS振镜作为激光光束扫描元件,具有体积小、宏观结构简单、可靠性高、功耗低等优势,是目前激光雷达实现落地应用的最合适的技术路径。
MEMS振镜(MEMS mirror)属于一种光学MEMS执行器芯片,可以在驱动作用下对激光光束进行偏转、调制、开启闭合及相位控制。
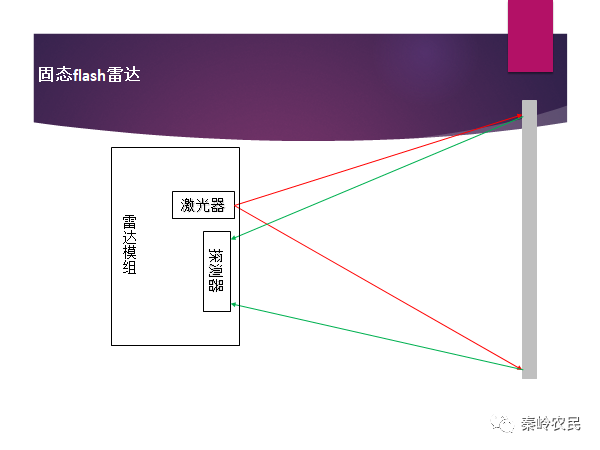
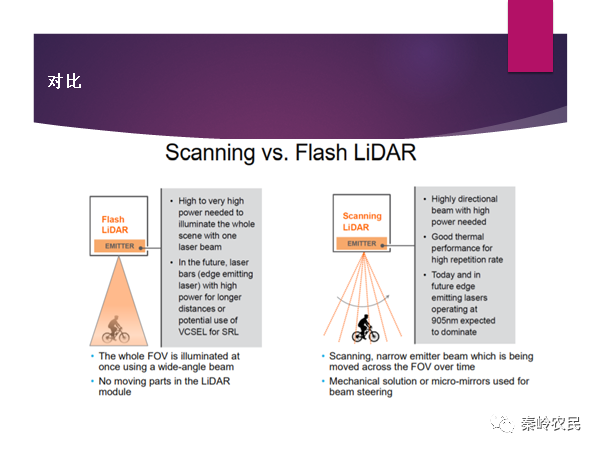
Flash激光雷达采用类似Camera的工作模式,但感光元件与普通相机不同,每个像素点可记录光子飞行时间。由于物体具有三维空间属性,照射到物体不同部位的光具有不同的飞行时间,被焦平面探测器阵列探测,输出为具有深度信息的“三维”图像
Flash激光雷达的优势在于能够快速记录整个场景,避免了扫描过程中目标或Lidar自身运动带来的误差。其缺点是探测距离近。
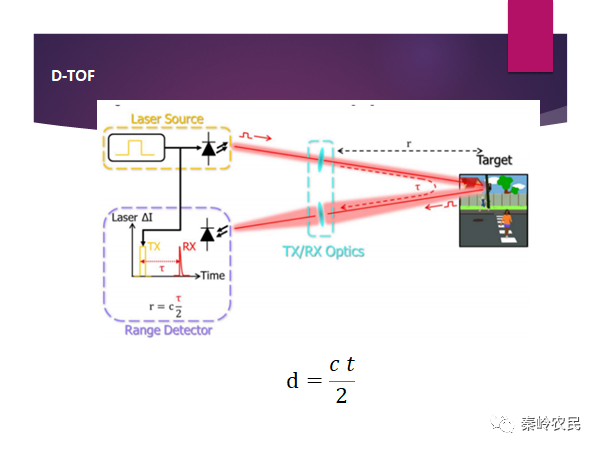
DTOF-Direct TOF,直接测量飞行时间,即测量发射脉冲与接收脉冲的时间间隔
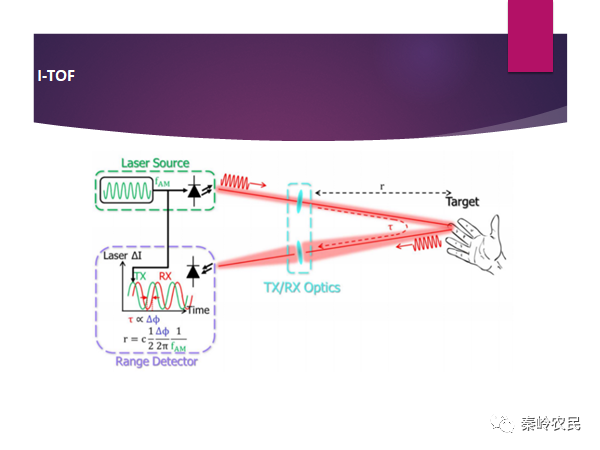
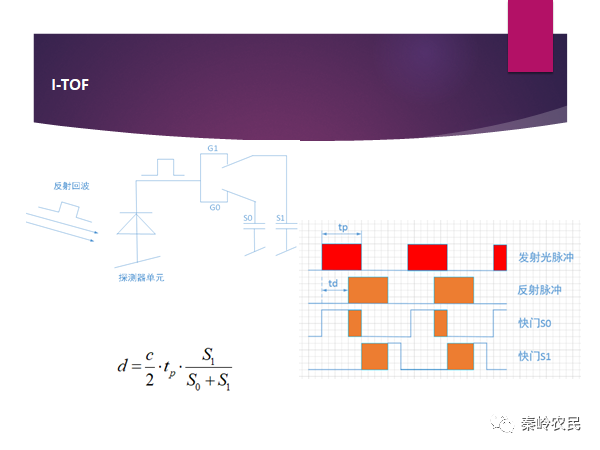
ITOF-Indirect TOF,间接测量飞行时间,大部分间接测量方案都是采用了一种测相位偏移的方法,即发射正弦波/方波与接收正弦波/方波之间相位差。
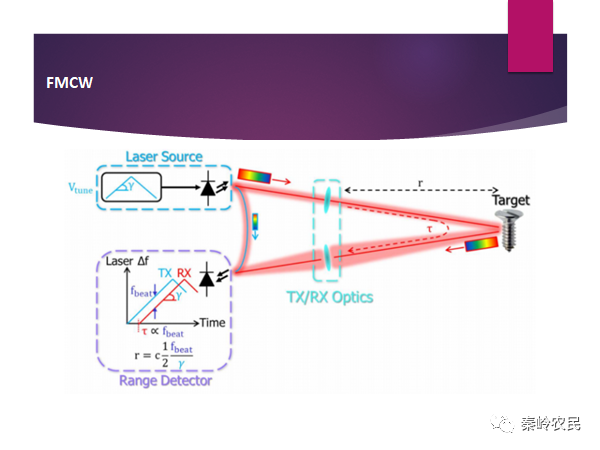
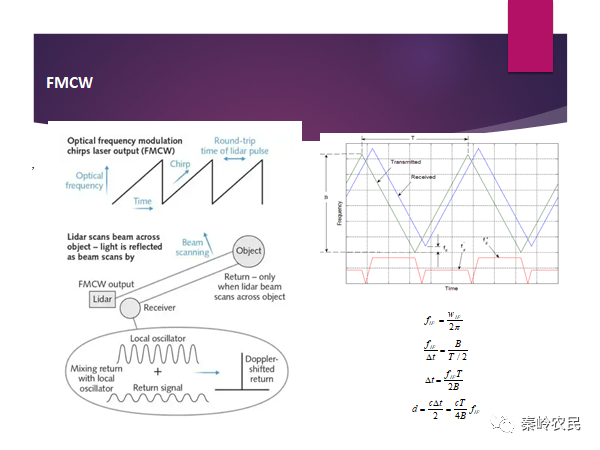
FMCW,即调频连续波。FMCW技术和脉冲雷达技术是两种在高精度雷达测距中使用的技术。其基本原理为发射波为高频连续波,其频率随时间按照三角波规律变化。