点击蓝字 关注我们
SUBSCRIBE to US
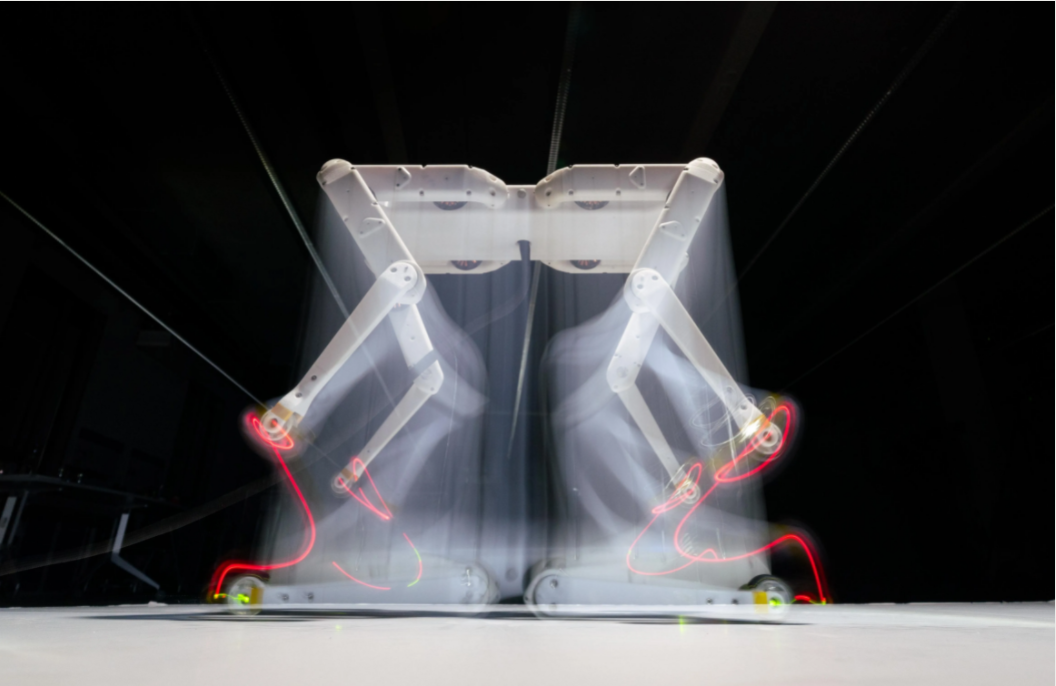
Solo 8, an open-source, research quadruped robot developed by Ludovic Righetti, one of four researchers leading a new robotics initiative at NYU Tandon. MAX PLANCK INSTITUTE FOR INTELLIGENT SYSTEMS/NYU TANDON
纽约大学坦顿分校将启动一项新的机器人技术计划,重点关注协作和改善城市生活。
This is a sponsored article brought to you by NYU Tandon School of Engineering.
纽约大学坦顿工程学院(Tandon School of Engineering)即将推出一项新的机器人技术计划,该计划承诺在工程和学术学科的研究和教学中采用独特的方法,并在该校数十年机器人技术的基础上进一步发展。
经过多年的规划,细节正在最终确定,我们(作者,以下简称我)有机会与作为新计划主要组织者的四位机器人专家进行了交谈,该计划将以十多位机器人学院现有的优势为基础,最终寻求吸收来自坦顿和纽约大学其他学校的其他研究人员。
Four roboticists are serving as the principal organizers of a new robotics initiative at NYU Tandon. Clockwise from top left: Giuseppe Loianno, S. Farokh Atashzar, Ludovic Righetti, and Chen Feng. NYU TANDON
这些研究人员被招募到纽约大学坦顿分校,作为2017-2019年两年“集群招聘(cluster hire)”的一部分,以支持坦顿学院院长Jelena Kovačević在广泛机器人项目中的跨部门合作愿景。
虽然他们的工作经常相互交叉,经常在项目上合作,但这些研究人员中的每一位都对机器人技术的研究拥有独特的角度。

NYU TANDON
Giuseppe Loianno,拥有自主机器人感知、学习和控制方面的背景,他专注于机器人自主性研究,尤其是无人机和其他机载机器人。他领导Agile Robotics和感知实验室(ARPL),也是NYU WIRELESS和NYU CUSP的成员。该实验室在机器人自主领域进行基础和应用研究,以创建在非结构化和动态变化的环境中运行的敏捷自主机器,无需依赖任何外部基础设施,并能够从经验中改进其自主行为。通过国家科学基金会与Atashzar和Feng,以及与陆军研究实验室和多个行业的合作,他的实验室也在研究如何使机器人更灵活、更具协作性——包括且不限于相互之间和与人类之间。
NYU TANDON
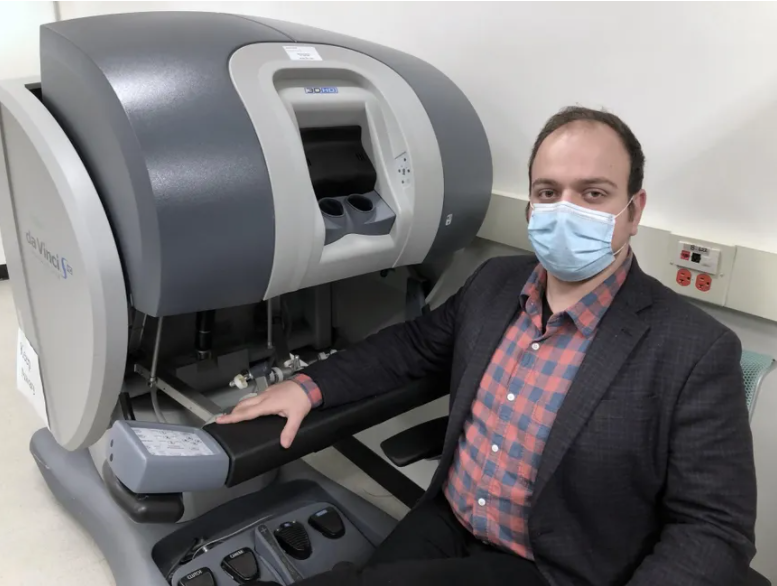
S.Farokh Atashzar的大部分职业生涯都致力于开发用于医疗和健康应用的网络物理系统和机器人,目前专注于远程手术和远程康复以及新一代电信功能。他最近收到了来自Intuitive Foundation的设备捐赠,包括Da Vinci研究工具包,这是一种外科手术系统,允许他的团队设计一种方法,通过该方法,一个位置的外科医生可以对位于不同城市、地区甚至大陆的某个病人进行手术。作为他领导NYU WIRELESS和NYU CUSP医学机器人和交互智能技术(MERIT)实验室工作的一部分,他还致力于尖端人机界面技术,实现神经到设备的功能,直接应用于外骨骼设备&下一代义肢和康复机器人。他与纽约大学医学院和美国食品和药物管理局(FDA)开展了积极的合作。他的研究得到了国家科学基金会的支持。

NYU TANDON
Ludovic Righetti领导纽约大学坦顿分校的机器运动实验室。在那里,他的团队发明了一些算法,使行走和操纵物体的机器人更加自主、灵活、安全。他的机器学习和最优控制的新方法可以使机器人“理解”何时以及如何通过改变强度、力以及更多基于对象材料、功能和用途的方式与环境和各种对象交互。除了在自主机器领域创造新的可能性外,他还通过Solo8和Solo12项目让更多的研究人员能够使用机器人,这是一种低成本、开源的机器人,可以替代昂贵的四足机器人。他的实验室在位于机器人技术和无线通信交叉点的NYU Wireless的工作包括设计基于云的通过5G链路对腿部机器人进行全身控制。

NYU TANDON
Chen Feng在土木工程、电气工程和地理空间工程领域拥有丰富的专业背景,致力于计算机视觉和机器人感知在建筑和制造业中的应用。在NSF和纽约大学坦顿分校C2SMART Tier 1 University交通中心的资助下,他将自己在视觉同步定位和制图(vSLAM)和深度学习方面的专业知识应用于开发自主驾驶、辅助生活和建筑机器人技术,持有这些应用程序的算法过程的多项专利。作为土木工程自动化和智能(AI4CE)多学科研究小组的负责人,他正在通过多学科应用基础研究推进机器人视觉和机器学习。例如,集体附加制造是一个旨在开发理论和系统的合作项目,其中一组自主移动机器人可以联合打印大规模3D结构。另一个合作项目ARM4MOD旨在使用四足机器人简化模块化建筑结构,从设计到制造再到安装,四足机器人可以在物理表面投影复杂的视觉地图。他还隶属于城市科学+进步中心(CUSP)。
下面是我们对这四位研究人员的采访。
一项新的机器人技术倡议
问
你能谈谈你是如何找到通往坦顿的道路的,以及你参与发起一项新的机器人技术倡议的动力是什么吗?你们是如何找到彼此的?倡议的想法是如何形成的?
Ludovic:虽然我们中有几个人在其他部门担任职务,但我们四个人都同在在机械工程部门任职,我们已经在一起工作了很久。我们都在几年内加入了纽约大学坦顿分校,并从一开始就进行了合作。我们有三个共同点,它们构成了这一新倡议的基础。
我们从一开始就相信的一件事是我们四个人和明年将加入我们的新教员之间共享机器人设施。我们希望拥有的实验设施不仅仅是我们实验室的总和。因此,学校现在正在投资建设一个新的设施,我们将拥有4000多平方英尺的实验空间。我们四个人并不是把它设计成一个独立的实验室,而是一个真正的集体空间,让我们能够做的比每个实验室各自独立能做的更多。
我们大家都有一个共同点,那就是我们四个人正在研究机器人技术的算法基础,包括控制、规划、学习、人机交互和感知。
最后,我们都致力于机器人技术的互补应用,这些应用可以有意义地改善人们的生活。
Farokh:我们来到坦顿,了解到领导层的热情和强烈支持,以及独特共享空间的计划。从加入纽约大学的第一天起,我们就开始讨论如何在这项新计划的不同方面进行合作。在多个部门之间共同任职,使我们能够成为专注于机器人技术的各个部门之间合作的桥梁。
我对该倡议的看法是,它不仅仅是空间和我们所做工作的总结。创建一个共享的物理中心将导致我们所做的事情的复杂化。是我们一起做的工作和我们的互动产生了新的项目、新的概念、新的愿景。
对于我来说,在一所工程和医学有着紧密联系的大学里学习也是非常重要的。因此,纽约大学是最好的选择之一。纽约大学也是城市结构的一部分。纽约市是我们的校园,这一事实使它非常独特。我们为未来的智能和互联社会制造机器人。
Chen:有一件事让我们的工作变得很有趣,那就是我们都是共同任命的。例如,Ludovic、Giuseppe和Farokh在电气和机械工程部门中被联合任命,我在土木和机械工程部门中被联合任命,我们都是几个不同中心的一部分。例如,我们四个人都是纽约大学CUSP的一部分,还有其他一些中心,比如NYU WIRELESS和C2SMART,我们中的一些人也是其中的一部分。这一点很重要,因为机器人技术的未来远不止机器人技术——它是机器人技术与高级人工智能、机器人技术与无线通信、机器人技术与生物医学工程、机器人技术与土木工程等的交叉点。
事实上,我们已经与纽约大学的许多现有部门和中心建立了联系,这一点至关重要,因为我们知道不同部门正在发生什么,并且我们已经与大量教师合作。这种设计有助于我们共同利用我们在坦顿的不同网络和资源,以确定可能的合作,并将所有资源用于该计划、该空间和该工作的成功。
Giuseppe:在加入NYU-TANDON之前,我在宾夕法尼亚大学,正在寻找我职业生涯的下一步。毫无疑问,不仅在过去,现在的纽约大学坦顿分校仍然是一个对机器人技术充满热情的地方,这里有着美好的未来前景,有可能在未来产生强大的研究和技术影响。这里是一个支持性的环境,处于一个具有巨大增长潜力和强大外部合作的多元文化城市环境中。
我认为,在这里发起这项倡议的另一个重要方面是,我们在纽约市,这一事实将在科学领域发挥重要作用。科技生态系统正在这里成长。有迹象表明,在未来五年内,它可能与硅谷等地一样,甚至更具活力。这对我们来说是一个巨大的机会,因为这让我们有能力创建创业公司,并与学术界内外的世界互动。例如,我们离布鲁克林海军造船厂很近,它可以作为孵化器,有很多空间可供我们利用。
此外,这项计划的独特之处在于,我们为学校带来了新的未来和愿景,以及我们如何进行能够影响未来10年机器人技术的研究和教育。
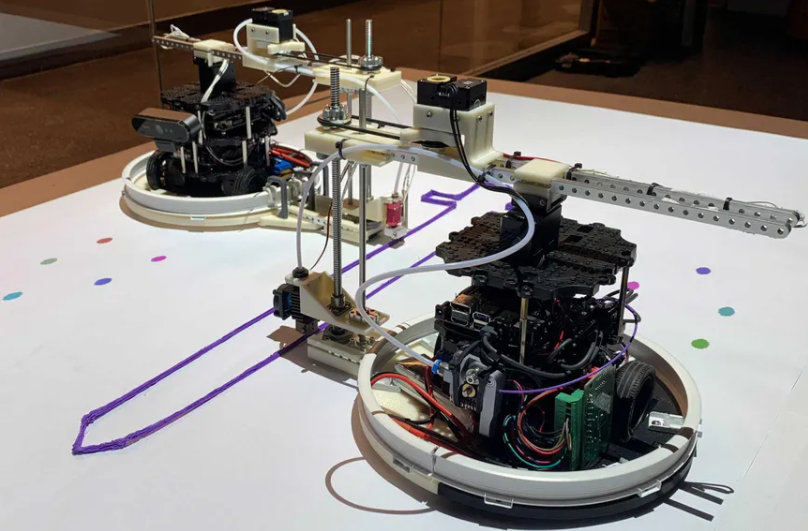
A mobile 3D printing robot at work in Chen Feng’s Automation and Intelligence for Civil Engineering Lab. Chen Feng
高度重视协作
问
你认为纽约大学坦顿机器人项目的独特之处是什么?它与其他大学机器人研究中心和计划有什么不同?
Ludovic:就规模而言,你无法将我们与更大的机器人研究所进行比较。然而,独特之处在于物理空间和共享基础设施。在我们的研究中,我们希望能够重现你在城市中遇到的情况。因此,我们正在研究如何将机器人带出实验室,并在整个城市的真实环境中进行测试。
我们都提到的另一件事是,这项倡议已经并将真正合作。我们分享助学金,我们都是彼此的博士生委员会成员。我们一起构思新的课程;我们一起开办了机器人小修课程。
Farokh:我们是四位年轻的机器人专家,最小的重叠足以有效合作。这项工作令人惊讶地好,因为我们都完全理解我们共同的科学语言,但应用程序是完全不同的。
让我们与众不同的是我们共同制定的教育计划。我们有独一无二的机器人课程。我相信这个国家很少有学校能提供这么多研究生和博士级别的机器人课程—— 我们总共有七门研究生机器人课程。我们还辅修了机器人学,为本科生教授四门不同的机器人学课程。
我们的愿景不仅是研究,还包括我们提供的教育,以及研究和教育如何以双向方式相互影响。我们正在为本科生、硕士生和博士生设计一个广泛而深入的研究型教育项目,该项目将随着时间的推移而发展。
Chen:在来到坦顿之前,我在剑桥的三菱电气研究实验室(MERL)从事工业研究。我想回到学术界,因为我喜欢与学生互动,我想做更多真正需要学术自由的机器人基础研究。
此外,我在土木工程系接受过培训。我获得了土木工程博士学位,研究建筑机器人。当我刚从博士学位毕业时,没有多少学校投资于建筑机器人技术,所以我几乎在学术界放弃了回到该领域的可能。然后突然,我看到纽约大学在这一领域进行了投资,成为全国少数几个投资于建筑自动化的土木工程部门之一。
这种专注于建筑自动化的能力确实让这项计划吸引了我。从历史上看,建筑业一直是一个低技术行业,没有从自动化技术中获益。但现在,随着最近通过的新的联邦基础设施法案,整个国家将在基础设施上投入大量资金。我们将见证自动化和机器人技术的发展机遇,这将有助于维护和更新国家的民用基础设施。我觉得纽约大学的机器人技术倡议将我们置于一个独特的位置,与其他以机器人技术为重点的大型学校相比,因为我们位于这个地理位置有趣的地区。在一个密集的城市环境中,给我们带来了许多现实世界中的民用基础设施问题,使我们能够思考如何使用机器人来改进这些基础设施项目,从而最终提高居住在这里的公民的生活质量。这对我来说是一件非常激动人心的事情,我认为这是一件独特的事情。
Giuseppe: 正如我之前所说的,由于我们所处的位置,机会指日可待。纽约有很多投资者,可以直接建立创业公司,如我们的未来实验室和布鲁克林海军造船厂。这方面的独特之处在于,我们如何将从基础概念开始的研究与城市问题相结合。
机器人技术应用……和挑战
问
你能否谈谈当今机器人技术的学术和商业前景,以及你们每个人都认为在这些领域需要解决哪些挑战,以便更好地推动机器人技术的发展?
Giuseppe: 许多人认为机器人技术是有用的,但只是对于小任务来说。他们从长远的角度看不到好处。
纽约市是一个独特的环境,在美国其他任何地方,也许在世界上,都无法展示机器人技术如何能够不仅仅在一般的生活任务中有用,而且可以应用于多个维度结合在一起的复杂城市场景。我们经历了疫情,建筑业正在发生变化。例如,您需要大量的监视和检查来保证安全性,同时还需要对基础设施进行监视。这是一种非常独特的环境,所有这些方面都集中在一个多元文化的城市环境中。在人力、思维、资本和空间方面,有很多潜在的能量,组合在一起,可以真正展示机器人技术更大的潜力。我认为这让投资者非常感兴趣,可以看到潜在技术的下一步发展。
Ludovic:关于机器人技术有很多炒作。有一些公司承诺了些我们明知道可能不会发生的事情,因为我们没有让机器人在非结构化环境中完全自治的技术。将我们所说的与实际发生的相匹配是很重要的。我们需要对我们在不久的将来实际能够做或将合理能够做的事情进行一次现实的检查,以使公众和行业不会因为不切实际的期望而失望。
在你可以控制的环境中,机器人真的很好。当机器人在我们无法控制的环境中自主时,它们的性能就会大大降低。这意味着当你周围有人时,当建筑工地周围存在混乱时,当你有灾难之类的事情时,他们还不是很可靠。
我们需要将我们所做的工作和我们如何解决问题转化为有意义和可信的自动化。我们需要创造对人们实际有用的关键机器人技术,在现实环境中有用,不仅要做出承诺,还要考虑如何解决人们遇到的具体问题。从这个角度来看,我们需要有一个双重的观点——在我们将开发的东西商业化之前,我们还要问:它将如何影响人们的生活?这真的会让他们的生活变得更好吗?
Chen:机器人技术的一个问题是,人们要么高估了当前技术的能力,要么低估了它。我们认为,我们的倡议可以通过我们的教育方以独特的方式来解决这个问题。我们正召集来自不同背景的STEM学生参加我们的机器人课程。通过这些课程,他们可以更好地了解技术现在能做什么和不能做什么,以及在不久的将来和今后很长一段时间内它可能能做什么。
通过帮助他们更好地了解该技术的能力,它将有助于设定现实的商业化预期。他们不会过分承诺,我认为从长远来看,这对机器人行业更健康。
Farokh:商业化或以行业为中心的研究的很大一部分基本上是测试和评估系统的性能,要进行测试和评估,您需要基础设施;你需要在市中心的昂贵的基础设施连接到现在正在发生的城市。我认为这使我们的倡议处于独特的地位。
让机器人“做事”
问
你们每个人都能分享一个特别的研究领域吗?你们对这个领域感到兴奋,这将成为新计划的早期关注领域?
Chen:我强烈感受到的是一个叫做移动3D打印的概念,它确实需要机器人技术的支持。我们想用移动机器人和移动机械手进行3D打印,就像混凝土3D打印一样。
我们甚至可以考虑把这些机器人打印机送到月球和火星为我们建造基地。这是Ludovic和我在过去几年里一直在努力的事情。我们正在努力建立这方面的理论基础,它也有很大的商业潜力。这是我非常热衷的事情,我想花时间解决这个问题。
Giuseppe:我主要在空中机器人领域工作。我们的主要目标是使我们的机器人无人驾驶更小、更灵活、更具弹性和协作性。我们正在研究未知环境中安全快速导航的相关问题,以及多个车辆如何相互协作。例如,不仅在群体方面,而且在多个车辆如何在运输或操纵大型物体的问题上进行物理交互方面,以及它们如何相互协作和与人类协作方面。
我的主要目标是真正提高这类机器的自主性,使它们更智能、更快、更具协作性。这对安全、搜救和货物运输等一系列问题都有影响。例如,你可以想象,自然灾害后的货物运输,甚至城市运输,现在基本上使用地面车辆。总有一天,它可能会使用自主无人机完成。
Ludovic:我对理解运动的算法很感兴趣。我正在努力了解我们如何让机器人移动并可靠地“做事”。所以做这些事意味着我在和大机器人一起工作,这些机器人可以像四足动物或两足动物一样四处走动。不仅可以四处走动,还可以在任何类型的环境中使用对象和执行任何类型的任务。如果有什么地方出了问题,他们可以找到答案,也许可以从中吸取教训,并随着时间的推移不断改进。我们如何解决它?我很兴奋能弄明白这一点。
Farokh:我对医疗机器人领域中以人为中心的机器人技术感兴趣。所以,我的实验室有三个重点。一个更基本的主要关注点是自主网络机器人。我们正在尝试通过网络连接机器人,我们致力于机器人的多代理网络,并了解分布式延迟如何影响可靠性、效率和性能,以及我们如何利用局部自治在机器和人类之间共享性能。在这方面,我们致力于人工智能、非线性控制和信息理论。
我工作的第二部分是中风和脊髓损伤患者的康复,以及我们如何制作一个机器人系统,帮助他们恢复失去的感觉运动功能。在此背景下,我们将重点关注在神经机器人智能和人类认知之间搭建一座算法桥梁。
我工作的第三个方面是外科机器人。说到手术机器人,我对自主手术感兴趣。与任何其他处于婴儿期的技术一样(例如15年前的自动驾驶),此时的自动手术听起来可能像科幻小说。但是,尽管它还没有达到我们所希望的规模,但在未来,当接触外科医生受到局限时,它或许很快就会实现了(例如太空手术)。
机器人改善生活
问
由于你们每个人都在这项新计划中贡献了不同的机器人技术背景,能否谈谈你们如何看待该计划的总体组织情况,以及每个专业领域将如何在更大的整体中发挥作用?
Ludovic:我们希望避免可能限制工作潜力的僵化的预定义分组。共享的物理空间将使学生和教师能够更好地相互协作,并看到彼此的工作,这目前是一个挑战,因为我们仍然处于不同的物理空间中。
在一个共享的物理空间中,人们可以参与并开始合作,包括相互交流专业知识,探索新概念,为科学和技术做出新贡献。
学生们在纽约大学已经处于一个独特的地位,因为他们不仅仅上机器人学和工程学课程。他们另外还有大量的课程,比如人工智能、医学、数学、人文等,纽约大学的网络相当大。
Chen:我们认为空间组织松散的一种方式是围绕着我们希望实现的机器人的功能。我们有一个野战机器人区,一个空中机器人区,一个服务机器人区,一个医疗机器人区。这些是不同的职能领域。然而,我们有目的地不把他们看作是不同的群体。通过不同的专业领域在一个共享空间内共同运作,以实现这一倡议的共同愿景:改善城市人民的生活。

微信号|IEEE电气电子工程师
新浪微博|IEEE中国
· IEEE电气电子工程师学会 ·
往期推荐
推荐阅读
模拟电路人工智能神经网络的前景
01-04 CHARLES Q. CHOI

面向未来的职业:IEEE会员对职业管理的建议
01-05 IEEE Transmitter

可持续性的商业必要性
12-06 IEEE Transmitter
澳大利亚初创公司研发新体系电池 或将超越液流电池?
12-03 JOHN BOYD
