



动力学是机器人力控必不可少的技术,可以让机器人更柔顺,更灵活,更易用,更智能。国内机器人公司的数量自2015年来不断涌现,国产机器人的数量也在不断攀升。更多企业针对机器人整机的动力学模型,在轨迹规划、位置控制与柔顺控制的实现过程中,也越来越重视动力学技术及应用。虽动力学知识有各类书籍、文献可以学习,但是由于其较为复杂,通过电子/纸质资料学习效率较低,无法满足学员快速掌握的需求。
基于此,睿慕课特邀桂凯老师及数字君老师精心专研推出课程《快速搭建“机器人动力学—参数辨识—轨迹规划—运动控制”的完整框架(第三期)》,开课时间为2022年1月10日。该课程帮助将学员快速搭建“机器人动力学——参数辨识——轨迹规划——运动控制”的完整框架,认识到动力学在机械臂性能提升上的重要作用,并将动力学运用到机器人系统中去。
通过课程,你将收获到
从原理到案例,轻松掌握机器人动力学
了解多连杆串联系统动力学关节动力学等建模方法;
掌握系统辨识的一般流程,掌握相关的信号处理方法;
掌握基本的轨迹规划方法,熟悉动力学对轨迹规划的作用;
掌握基本的碰撞检测方法,熟悉机器人振动分析;
了解机械臂的各种位置控制方法,掌握机器人动力学对位置控制的影响;
了解机械臂的各种柔顺控制方法,掌握机器人动力学对柔顺控制的影响;
了解并通过实战,掌握ROS中控制器基本框架及应用 (第三期新增)。
讲师介绍

桂凯
上海交通大学机器人研究所 博士
研究方向包括机器人动力学与控制,柔顺控制,SEA控制,机器外骨骼及生机电一体化,专注于将动力学理论付诸于实践,有着丰富的仿真与实践经验。工作以来,专注于研发机器人动力学控制器以及力控机器人工作站。

数字君
慕尼黑工业大学 硕士
任职某省级实验室机器人算法工程师,专注于基于动力学的机器人规划与控制算法开发与应用研究方向包括机器人规划控制,强化学习,有着丰富的机器人项目经验。
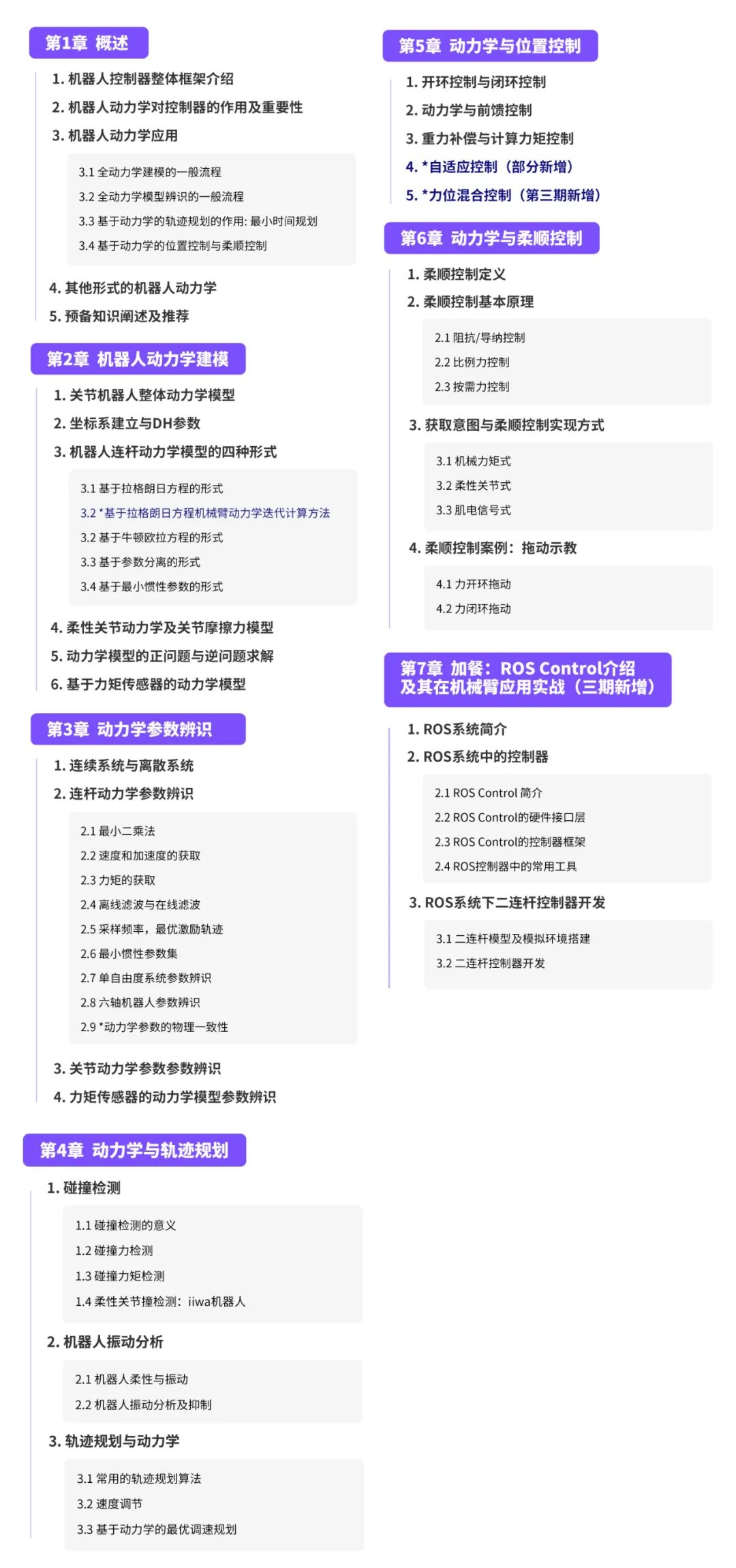
课程安排&大纲
通过课程学习使学生了解机器人多连杆动力学建模的方法、关节柔性建模的方法、动力学参数辨识整体过程、机器人动力学对轨迹规划的作用、机器人动力学对位置控制的作用、机器人动力学对柔顺控制的作用。快速掌握常见的动力学建模方法,以及机器人动力学规划与动力学控制的基本思路,机械臂动力学机器使用场景,解决实际工程问题。
第三期课程新增了科研中常用的ROS Control介绍与实战,以及新增了部分章节内容,并采用统一框架完善了实战作业体系,加深学生对机械臂各模块的理解。


识别二维码,
添加小助手,私聊咨询
练习项目&挑战项目
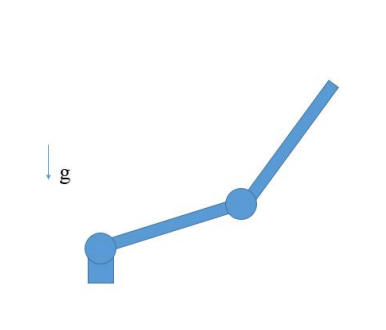
【项目】围绕二连杆机构实战
往期课程评价
课程信息
开课时间:2022年1月10日
课程难度:中级
学习方式:线上(录播+直播)
学习时间:约8周,建议4-8小时/周
适合于高校及研究所中与动力学相关的研究人员
适合机器人相关公司的算法研发人员
建议有一定的机器人基础
Matlab语言编程,线性代数,微积分,信号处理
Matlab 2018b及以上(软件要求)
抢先报名
添加小助手 了解更多课程详情
点击关注睿慕课


点个在看你最好看


