

熟悉示波器的朋友可能都会有过这样的困惑:输入阻抗有1MΩ和50Ω两种,我们到底该如何选择呢?
示波器测量与50Ω相关的注意事项
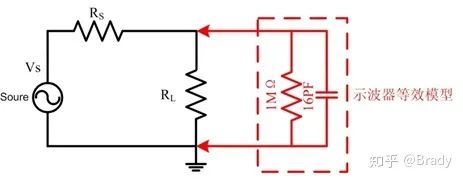
示波器接入后等效电路
1MΩ阻抗和50Ω阻抗档位的设计出发点是不同的,1MΩ档位的出发点是为了让示波器拥有较小的负载效应,可以“安安静静的”做个旁观者。而50Ω档位则是为了消除传输线上的信号反射,将传输线影响降到最低。选择何种阻抗档位,需要根据实际测量情况而定:
1、当被测信号是一个无负载信号(如信号发生器),且采用50Ω特性阻抗同轴电缆与示波器相连接时,则需要使用50Ω阻抗档位。
2、当被测信号是一个板载信号,有自己完整的终端接收系统时,则需要使用1MΩ阻抗档位直接测量或者使用探头测量。
3、配合探头测量时,需要注意无源探头都需要使用1MΩ阻抗档位,有源探头则需要根据探头要求进行匹配,一般来说高频探头要求50Ω阻抗档位,低频探头要求1MΩ阻抗档位。
4、使用无源探头时需要注意,1:1探头通常只有6MHz的带宽。想要更高频率,需要选用带衰减的无源探头。
当示波器同时提供50欧姆输入和1兆欧姆输入时,如何选择合适的输入耦合关系到测量结果的准确,以下是我们对于示波器耦合输入选择的建议:
当使用10X探头时,选择1M欧姆输入
当示波器与10x探头一起使用时,唯一的选择是1兆欧输入,没有其他的选择。
如果待测信号带宽低于200 MHz,则10x探头是非常合适的适通用探头。10x探头的缺点是:由于将信号衰减10倍,因此信噪比降低20 dB。
使用线缆直接连接测试低电压信号时,选择1M欧姆
如果是测量非常低电平的信号,请选择直接线缆连接到示波器,并选择1M欧姆输入。这样可以利用示波器放大器的全部灵敏度,选择1M欧姆输入,能够测量高达50 V的电压,并具有较大的动态范围偏移和交流耦合。
使用直接线缆连接并选择1M欧姆输入的不利之处在于,可能会引入反射误差(如下图所示)。
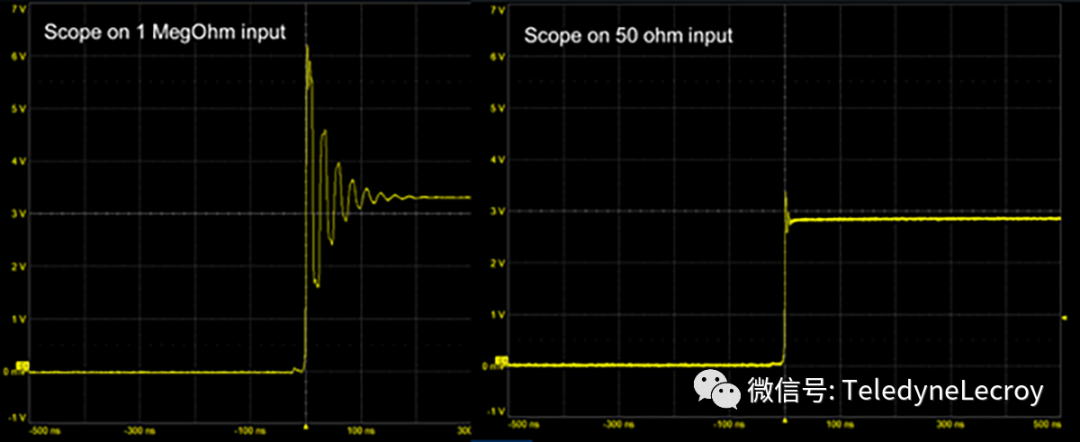
当信号遇到瞬时阻抗变化时,总是会发生反射,如果信号源的上升时间大于线缆延迟的4倍,则在信号的上升沿或下降沿会忽略掉反射,反射误差可以忽略不计。
如果信号上升时间很大或线缆较短,则不必担心反射问题。在示波器上使用1兆欧的输入阻抗就可以了,能够查看更高电压信号,具有更大的DC偏置并可使用AC耦合。
使用50欧姆电缆时,请使用50欧姆来消除反射
选择50欧姆输入时,注意防止过压损坏
声明:
投稿/招聘/推广/宣传 请加微信:15989459034

