前言
场景定义
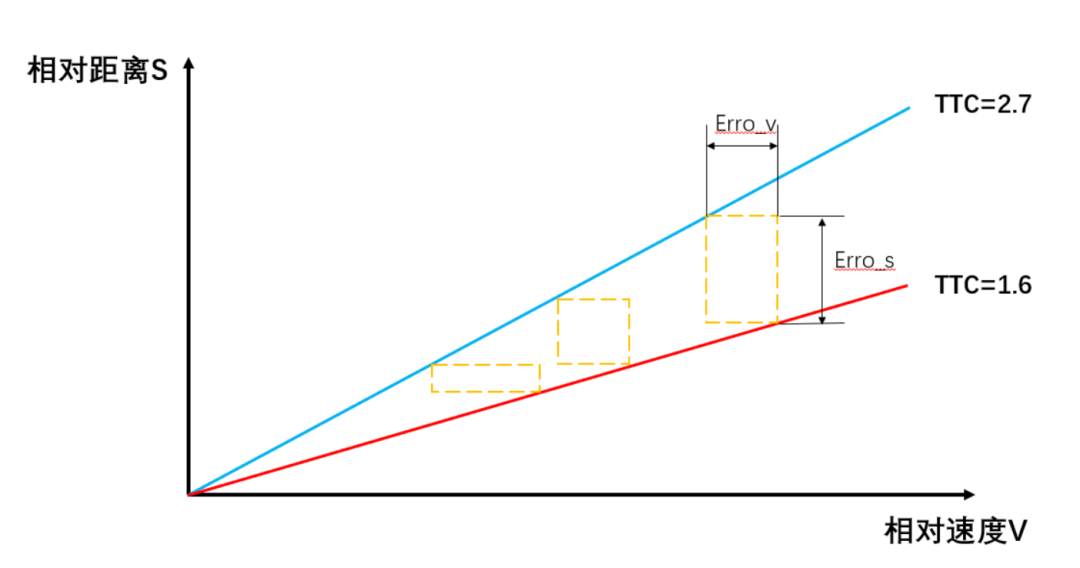
直行时自车前方有前向行驶目标车,自车车速高于目标车,碰撞时间大于2.7s时自车发生制动,导致与后车追尾。
定量计算
已知:
S/V=TTC=2.7;
S(1-a)/V(1+b)=1.6;
可得a和b的关系:
a=-0.59b+0.41
扩展
总体思路
注:
笔者这里参考了ISO26262硬件部分的概念。失效率:指单位时间内元器件失效的概率。PMHF(Probabilistic Metric for random Hardware Failure):单位时间内发生单点故障或多点故障中多点都发生故障的概率。一个元器件失效不一定会导致危害,只有发生单点故障,或者多点故障中的“多点”都发生故障,才会导致危害。PMHF就是用来度量导致危害的硬件失效概率密度的指标。信号“失效率”与AEB误报率的关系,就可以类比成硬件元器件的失效率和PMHF的关系。
问题一
(1)
问题二
问题三
(2)
(3)
注:公式(2)解释和推导:连续发生N次的前提是先连续发生N-1次,然后再发生一次。但是发生N-1次之后的这次尝试有两种可能,一是事件X发生了,则不需再次尝试(对应公式中P*0),二是事件X未发生,则需要从头开始再尝试E(N)次(对应公式中(1-P)*E(N))。
可整理得到:E(N)=(E(N-1)+1)/P;
已知E(1)=1/P;E(2)=(1+P)/P^2;
……
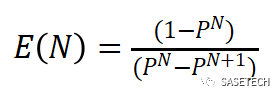
E(N)=(1+P+P^2+…+P^N-1)/P^N
分子为等比数列求和,可化简得:
E(N)=(1-P^N)/(P^N-P^N+1)
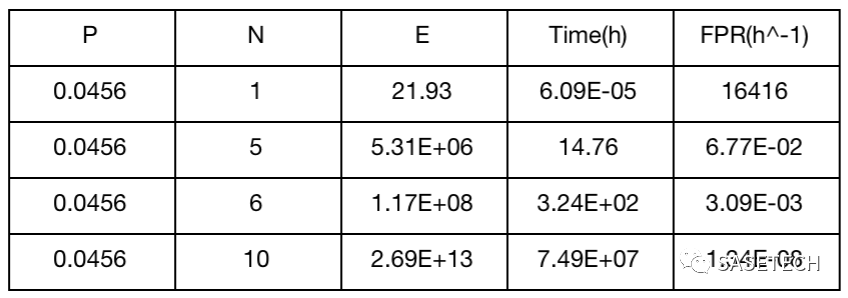
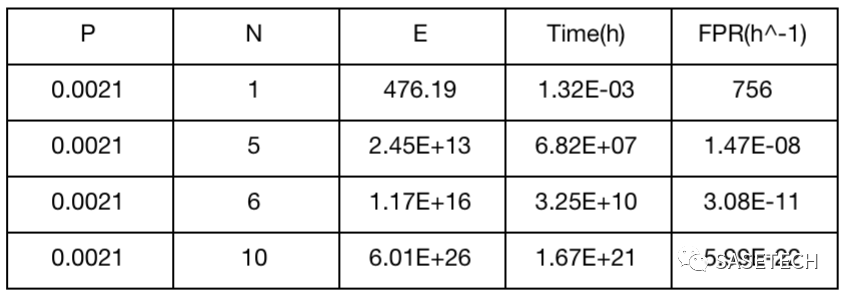
计算结果
总结
END
作者简介
田野
曾任功能安全工程师,参与高低速智驾系统功能安全开发,底盘零件功能安全开发,以及预期功能安全预研项目,熟悉功能安全和预期功能安全分析方法,现从事嵌入式软件开发工作。
SASETECH专家申请(请扫右侧二维码提交)

微信交流群入群
(添加管理员微信,备注公司+姓名+研究领域)