OPTION_5:HP
美国麻省理工学院(MIT)计算机科学与人工智能实验室(CSAIL)的研究人员透过交错结合固态与液态的3D打印模式,成功打造出紧密封装的液压致动器。
为了证实这项研究发现,研究人员设计了一种3D打印的液压驱动机器人,它必须能在打印出来后直接以液压驱动,而无需加以组装。研究人员们希望这种新的打印策略可实现更简单的机器人机制——仅需使用最少的组装与模具来整合基本的马达与电池模块。
这 种新型的3D打印策略需要多个油墨喷嘴,一个用于UV固化的光敏聚合物(使其形成固体),一个用于非固化的液体。该研究的主要障碍在于找出有效的打印模式 (以及20-30微米(ms)的液滴溶液),从而让液体与UV固化树脂并列排放,而不至于因为湿润作用而无法聚结或溃散。
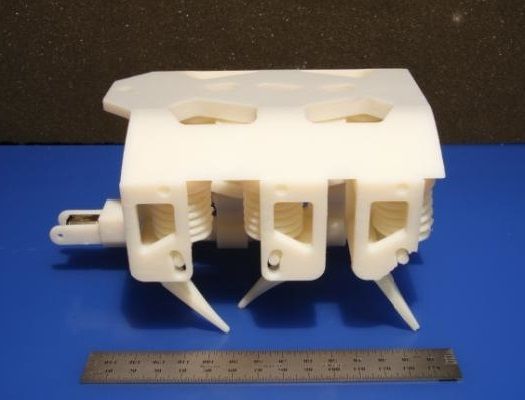
研究人员以3D打印交错结合固态与液态,打造出以液压致动器驱动的机器人
Source:MIT
其 结果是以3D打印的复杂预填充流体通道。研究人员利用柔软的橡胶取代固体材料,透过3D打印出以12个液压泵实现抓取功能的小型6脚机器人,证实了“可列印液压”的概念。内建于3D打印机器人身体中的12个液压泵均经由一个独特的曲轴(由一个外部马达与电池驱动)进行移动。
在机器人的各种关键组件中,有好几组像是手风琴般的“风箱”(波纹管),都是直接以3D打印于其身体中。为了推动机器移动,这些波纹管利用液体的压力,并在随后被转化为机械力。机器人的其他组件还包括软橡胶的拾取器,以及能够产生连续流体流动的齿轮泵(以取代波纹管)。
编译:Susan Hong
本文授权编译自EE Times,版权所有,谢绝转载

关注最前沿的电子设计资讯,请关注“电子工程专辑微信公众号”。
















