PMBus系统的故障管理架构
时间:2014-05-04
作者:Michael Jones
分享
 扫码分享到好友
扫码分享到好友
作者:Michael Jones 凌力尔特科罗拉多设计中心的应用工程师
最近有些人问到关于运用内建故障管理与PMBus(电源管理总线)通讯技术这方面的事宜。这个问题可分为两个层面:运用PMBus对故障-关闭(fault-off)决策所产生的影响,以及该如何建构涵盖整个系统的故障纪录?在深入探究这两个PMBus的应用之前,我们先来看PMBus规格,以及PMBus制订者的意图。
PMBus规格涵盖了警示、故障、以及个别装置的反应;传递故障信息有两种方法,亦即警示响应地址(Alert Response Address,ARA),以及主装置通知协议(Host Notify Protocol,HNP)。ARA一开始会透过发出ALERTB来中断机板控制器,而控制器则会利用PMBus地址查询,汇整出所有使用ALERTB的装置列表。
由装置启动HNP,之后它会成为一个主控PMBus,并把STATUS_WORD直接传送到机板控制器。在实务上,装置会先响应,之后再通知机板控制器。这种流程能保护装置与负载端,确保对故障事件最快做出反应,方法就是停止电源传送。
PMBus规格的内容
PMBus还有两方面的问题尚未解决:1. 装置之间的互动;2. 故障纪录。
这两个问题都刻意被搁置,因为PMBus委员会认为这些功能留给厂商自行研发解决更为适合。当然,发展这些功能有许多途径: 运用PMBus与机板控制器,或利用内建功能。这些大致上就是所询问内容需要的基础。以下开始解说。
第2页:解说PMBus尚未解决问题:1.装置之间的互动;2. 故障纪录。
{pagination}
用机板控制器的参考设计方案建构一个原型系统,此系统采用多线程的RTOS实时操作系统(multi-threaded RTOS)。这个原型说不上是最佳的运算例子,但确实会产生实用的数据,在实务上甚至可能无法达到这样的结果。
在硬件方面,使用Freescale的Kinetis K60,搭配虚拟静态存取内存(PSRAM)以及铁磁体磁心内存(FRAM)。使用PSRAM是为了方便:我的系统已经装有硬盘机。使用FRAM是因为数据在写入交易的最后频率才会送出,不需要写入扇区(block),而且老化失效前可写入得次数非常大。在PMBus装置上,我使用LTC3880、LTC2974、以及LTC2977。我在LTC3880的VOUT 0内置入一个电源负载,由它来产生一个故障事件。
遥测是在它自己的线程内运作,故障处理则在另一个线程,另外还有一些优先权限较低的运用程序线程。应用大致工作如下:
1. ALERT/在过电流发生时送出;
2. 透过ARA来获得地址;
3. 读取STATUS_WORD;
4. 做出Power off决定并执行;
5. STATUS_WORD 储存于 FRAM;
6. 输出电流从所有13个电源端读取;
7. 输出电流储存于 FRAM;
8. 设定retry 定时器;
9. 执行Retry。
这只是个近似模拟,因为若同时有多个电源端故障发生,就会有更多状态储存在FRAM。这种状况很常见,因为过电流会导致低压,而多个电源端间可能产生交互影响。
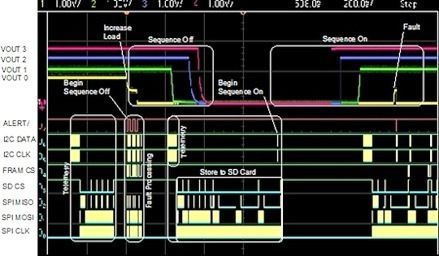
在I2C总线上进行遥测,所有13个电源端花费约40ms
上面的波形图撷取各项结果。我们可以看到在I2C总线上进行遥测,所有13个电源端花费约40ms,结果则储存在SD记忆卡,花费不到200ms的时间。但后面一个遥测则花费300ms。由此可见SD记忆卡适合用在遥测,但不适合用在故障纪录。其理由相当复杂,但只须记得SD记忆卡含有FAT文件系统,所以作业数包含读取目录结构等步骤。
在ALERT/接脚上可看到多个步骤,故障处理的总时间约为50ms。这个时间包含执行多个ARA、从多个电源端读取状态、收集一些输出电流读数、然后将数据储存到FRAM。故障事件会触发关闭程序,会花上超过400ms的时间。最后则是执行重试程序。
{pagination}
进行到这里有好消息也有坏消息。好消息是在一个13个电源端的系统中,要把多个故障事件记录到日志,储存故障数据的程序得花50ms。这个数据很接近最糟状况的数值。一般的故障事件从收集一直到储存数据,只须不到10ms就能完成。若从重试开始仔细观察故障事件,可以看到多个FRAM传送,因为执行ARA的速度非常快。在这种状况中,系统仅须数毫秒的时间就需撷取到原始的故障事件。
现在来说说坏消息:关闭电源端得花费数百毫秒。没错,我知道这不是一般的真实系统,目的只是想让大家看看如果没有考虑到你的PMBus故障响应是如何设定的情况下,系统得花多长的时间来关闭电源。
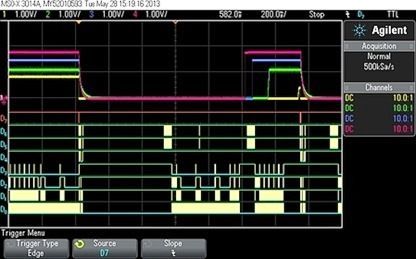
未考虑PMBus故障响应所需的电源关闭时间
现在切换到立即关闭模式,注意到电源端关闭的速度变得多快。我们放大一点来看:

切换到立即关闭模式的电源关闭时间
切换到立即关闭后,系统须花2.5ms来关闭电源端。这个时间包含了读取状态缓存器、用遥测来分享总线、以及命令电源端关闭。因此,这个数值可能会有些变动,有时会较快,有时则会较慢。最好的可能状况是一个ARA之后读取状态,再接着一个全局关闭指令。使用的是一个读取byte(长度为3 byte)、读取状态字符(5个byte)、全局关闭(6个byte)。
在400kHz的频率速度下,时间为375us。不过这不包括任何驱动程序的消耗时间。注意,3个电源端会很慢地缓降,因为它们的负载只有数毫安。电源虽然很快就关闭,但还是需要一个负载才能压低到地电位,这则是另外一个问题。虽然这已经好得多,但是否还能做得更好?当然,如果装置有内建故障管理机制,还有改进的空间。我们来看看能做些什么。
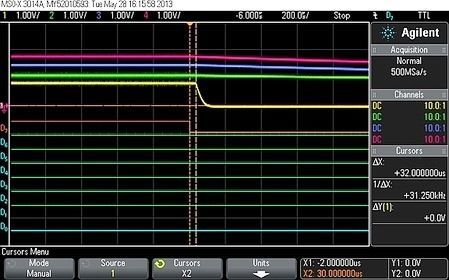
内建故障管理机制的电源关闭时间
电源端在30us内关闭,并在不到100us内降至接地电位。这是负载很轻的电源端。如果我使用一个20安培的负载,那么关闭的速度就快上许多。如此短暂的延迟无须和其他替代方案评比──只是简单的比较。你的程序代码不一定得做这些,因为对内建故障回应没有影响。
{pagination}
那么最终的结论是什么?遥测方面使用PMBus,全系统故障日志确实有用。你可以搜集整个系统的数据,然后很快存入到非挥发性内存。除了大多数装置上内建故障日志功能,还能增加更多价值。
一般来说,内建日志对于故障事件的来源会记载更细部且更实用的信息。外部日志通常会有整个系统的时间戳信息。同时利用两种日志,成功诊断的机会就会大增。然而想要用一个串行端口来保护负载,并不是好的方法。对于一个400kHz的序列总线而言,理论上最好的作法来比内建解决方案速度慢上10倍。
我们以不同的角度来看问题。假设一个串行总线必须在30us内关闭电源端,那么它的频率得要多快?以一个14 byte的理想状况来说,等于112 bit。再预留一点时间给中断延迟与/或决策逻辑,则可推算出约4MHz。接着考虑若总线上同时有10个装置故障,会发生什么状况。将会需要40MHz。
接着再考虑一个100电源端的系统…在两种状况中,亦即负载保护与故障日志,PMBus的功能都足以做出回应。但在日志方面,最好的作法是在日志内建改良,在负载保护方面,最好是运用装置的功能来分享故障信息。而这也正是PMBus委员会想要达到的目的,就是建立一个共享的标准来解决问题,同时亦支持创新研发。















