电动汽车动力总成控制方法
时间:2011-11-01
作者:Thomas Hafner,Günter A. Hank
分享
 扫码分享到好友
扫码分享到好友
作者:Thomas Hafner
汽车微控制器软件营销经理
Günter A. Hank
32位汽车微控制器产品营销经理
英飞凌科技
长期以来,诸如永磁同步电机(PMSM)和感应电机等三相交流电机,被广泛地应用于工业控制系统。在汽车应用领域,这些电机还是相对时新的装置,目前正被逐渐用作传统内燃机的补充品或替代品。PMSM采用的绕组为三相正弦分布绕组和机械位移绕组。三相正弦波和时间位移电流可以产生旋转磁场。这一旋转磁场使电机转动,通过(逆变器中的)MOSFET切换电机绕组的电流而产生。磁场定向控制(FOC)算法为电机电流控制生成PWM模式。转子的位置和电流持续不断地被检测。基于高性能微控制器的高效FOC系统,为电动汽车和混合动力汽车驱动提供安全高效的解决方案创造了条件(图1)。
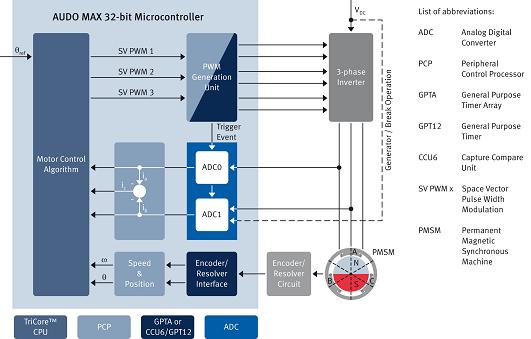
图1:运行于FOC模式的32位TriCore微控制器。
AUDO MAX产品系列的PWM生成方式
英飞凌的32位AUDO MAX系列微控制器内装一枚主内核(TriCore CPU,浅绿色)和一枚快速协处理器(被称为PCP,深绿色)。这种非对称架构能够利用PCP高效处理外围设备,而无需中断在TriCore CPU上运行主算法的处理进程。PCP负责处理关键的实时中断负荷,因此可减轻CPU的负担。
有两种方案可以生成驱动逆变器的PWM。GPTA可生成非常复杂的PWM模式,例如非对称死区时间生成或定制模式。外设模块CCU6是一个低端方案,可用于生成中心对齐和边缘对齐的PWM模式。相比GPTA而言,CCU6可以以较低的软件开销直接支持PWM信号生成,同时,无需配置多个定时器单元。
CCU6和GPTA这两个模块都具备触发功能,能够让PWM信号和A/D电流测量实现无延迟的等时同步(参见箭头“触发事件”)。作为一个附加的安全特性,每个GPTA模块都配有“紧急模式停止信号”,可用于设置安全开关。针对TriCore AUDO MAX微控制器系列的所有成员,提供了一个基于PRO-SIL的安全平台,它包含硬件(安全看门狗CIC61508)和软件(SafeTcore驱动程序),可满足ASIL认证的B级至D级要求。
通过模数转换器(ADC)测量电流
图1所给示例对电机的两个相电流进行了测量,并采用了一个模数转换器对其进行转换。基于逐次逼近寄存器(SAR),该模数转换器具备很高的精度(12位分辨率),并且转换时间小于1微秒。由两个已知的相电流可以计算出第三个相电流。针对更高的安全要求,建议对电机的第三个相电流进行额外的测量。针对这一应用,带有第三个模数转换模块的微控制器可供选择。
连接旋转变压器和编码器
旋转变压器将PMSM转子的角位移转换为一个电气值。一般情况下,可利用一个附加的正切函数电路从两个信号(正弦/余弦)导出转子的角度值。旋转变压器电路的信号输出至SPI总线,也可由微控制器直接读取旋转变压器的正弦和余弦信号。还有一种可选的方式是读取编码器信号,在运行于微控制器GPT12的编码器接口中对其进行调理,再反馈到控制算法。
AUTOSAR之外重复利用汽车电子软件
近年来,汽车电子软件和通信已通过OSEK、AUTOSAR、FlexRay等规范而标准化。除标准化软件成分以外,汽车电子系统还使用了可在多种应用中被重复利用的控制算法。如今,电机控制由分布在汽车车身、底盘和动力总成系统各处的电子控制单元(ECU)来完成。
MC-ISAR eMotor驱动程序提取了三相电机应用中电流控制的一般特性,设计用于支持多种位置信息采集模式和逆变器控制装置。
三相电机控制
英飞凌AUDO MAX系列非常适用于电机的控制。TriCore架构和MC-ISAR eMotor驱动程序可采用高级控制策略控制多台三相电机,包括无刷直流电机(BLDC)块交换(block commutation,BC)及永磁同步电机(PMSM)磁场定向控制(FOC)。
单一微控制器甚至还能同时支持BLDC和PMSM电机控制。相比于其他类型的电机而言,采用FOC控制的PMSM电机能效更高、磨损更小,并且可以实现精确控制和定位。特别是,这种电机支持线性转矩控制,为将其用于混合电动汽车动力总成系统奠定了基础。
图2显示了MC-ISAR eMotor驱动程序的电流控制环路,右侧为复杂设备驱动(CDD)。这个时间关键型电流控制环路在中断上下文中进行处理,处理时间不超过50微秒。左侧是附加的用于位置和转速控制的软件成分(SWC),由应用程序提供。
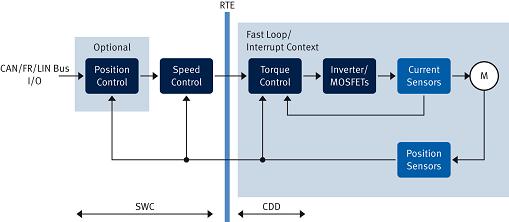
图2:电机控制中的电流控制环。
位置检测和电流检测模式
为符合精确定位的要求,MC-ISAR eMotor通过采用霍尔传感器外加增量编码器和旋转变压器,实现了典型高分辨率检测模式。此外,还可将无传感器FOC用于故障安全模式。对于成本敏感的应用,AUDO MAX系列支持直接旋转变压器模式,该模式通过软件和分立元器件实现,避免了配备外置旋转变压器IC的需要,这能使每个控制单元在成本上降低2美元左右。与此同时,MC-ISAR eMotor可以支持两相或直流母线电流测量模式(图3)。
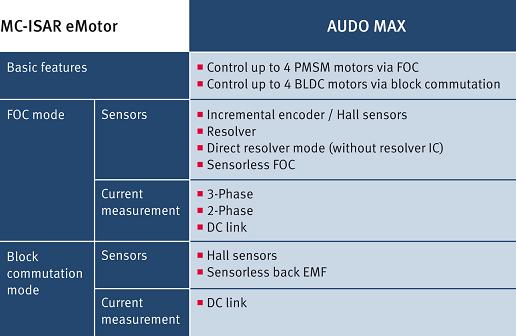
图3:MC-ISAR eMotor操作模式。
MC-ISAR eMotor软件划分
此软件可划分为两个组成部分:不依赖于硬件和依赖于硬件的成分。不依赖于硬件的模块用于EmoControl、位置信息采集PA和FOC(图4)。因此,EmoControl是通过FOC控制方向和电流的主要模块。送入电机的电流决定了转矩。MC-ISAR eMotor驱动向应用程序反馈电机位置和转速信息。位置信息采集PA模块负责从旋转变压器和编码器信号中提取角度信息。具备Park-Clarke变换和空间矢量调制(SVM)的FOC,是通过检测给定电流和位置来设置新电流的主要部分。
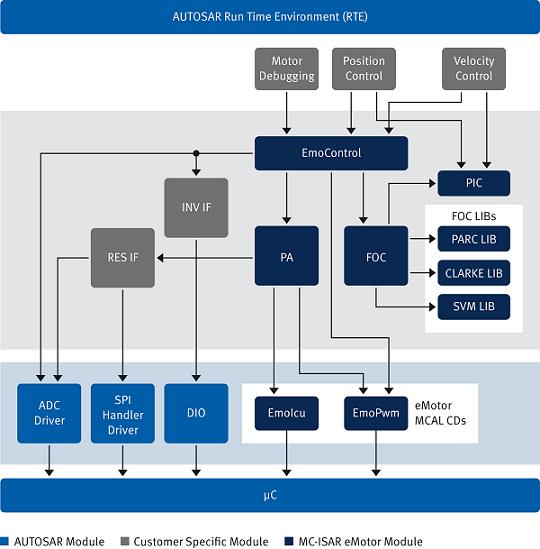
图4:磁场定向控制(FOC)模块框图。
硬件相关的模块,包括重复使用的AUTOSAR MCAL驱动(ADC、SPI、DIO),或PWM信号生成(EmoPwm驱动CCU6)和编码器接口EmoIcu(通过GPT12读取编码信号)的专用模块。客户编写的位置和转速控制代码,可以按标准软件成分(SW-C)添加,就像AUTOSAR所提供的一样。
MC-ISAR eMotor安全考虑
为支持符合安全要求的应用,从一开始设计软件成分时就考虑安全要求非常重要。在ECU的开发阶段应明确应用的特定需求,并且,这些需求将随应用的不同而不同。此外,为支持安全应用,还应考虑现成电机驱动的某些安全因素。MC-ISAR eMotor采用符合ISO26262的软件开发流程开发而成,并可支持安全相关系统中的三相电流测量。
英飞凌eMotor主要优势概述
英飞凌AUDO MAX系列和MC-ISAR eMotor驱动,可并行控制多达4台PMSM或BLDC电机,同时还能满足应用任务控制所需的性能。MC-ISAR eMotor和标准AUTOSAR MCAL驱动由同一配置工具整合,因此,用户可在同一界面中为AUTOSAR MCAL和MC-ISAR eMotor驱动配置微控制器资源,为无缝配置不同软件模块创造了条件。汽车ECU开发人员可专注于电机的应用相关控制,而无需改编电机的控制算法。为降低系统成本,AUDO MAX系列还支持直接旋转变压器模式,免除了加装旋转变压器IC的需要。AUDO MAX系列和MC-ISAR eMotor驱动被设计用于支持安全应用。
本文来自《电子工程专辑》2011年11月增刊《汽车电子特刊》,版权所有,谢绝转载。















