机器视觉系统设计要素分析
时间:2009-04-02
作者:Venkata Raghavan
分享
 扫码分享到好友
扫码分享到好友
一般来说,机器视觉(Machine vision)就是一个与电脑等处理单元连接、可进行图像处理并控制某个系统的光电系统(相机)。这是一种可以“看到”目标物体的系统或电脑。生产装置、产品质量控制、取放机等等系统都可以采用机器视觉控制。利用Firewire、USB或以太网等电气接口使图像传感器和透镜系统(相机)与电脑连接,电脑再与控制设备相连接,就可以获得一个机器视觉系统。
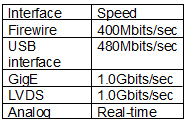
表1:电气接口
机器视觉应用需要结合使用以下软硬件才能确保成功:
* 相机
* 主机电脑
* 帧捕获器
* 应用软件
虽然选择正确的硬件十分重要,不过机器视觉系统的核心乃视觉检测软件。传感器(一般由像素时钟驱动)有一组寄存器,用户可用以经由SPI 或I2C接口对分辨率、工作速度、放大倍数控制、曝光时间和积分时间进行配置。传感器输出帧同步与线同步脉冲以及数字数据以待处理。
传感器的电气接口为速度高达200MHz的CMOS。在速度较大时,需要一个LVDS接口来实现信号完整性。图1所示为机器视觉相机的典型系统架构:
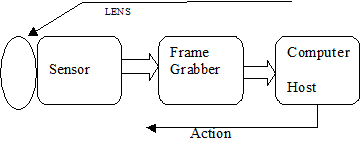
图1:机器视觉系统的主要部件。
具有离线处理功能的相机
这种机器视觉系统结构通过Firewire、USB或 GigE等业界标准电气接口与一个单独的相机配合工作。相机单独供电,原始数据经由电气接口发送到主机。根据应用需要,视频传输可以是连续帧,也可以是一个数据帧。单帧捕获和视频传输被称为触发模式,利用一个外部系统向相机系统发送电脉冲(一般在CMOS级).
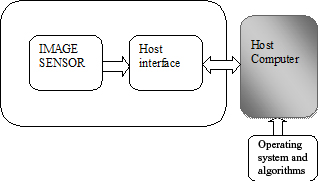
图2:带离线处理功能的相机
相机的逻辑电路将启动单帧积分并通过电接口把摄后数据传送到主机。在某些情况下,原始数据通过总线与同步信号、时钟一起发送到终端数据采集系统,比如帧捕获器。帧捕获器把这些数据储存在存储器中,供主机应用软件在进行处理和控制任务时所用。
相机到主机的电接口包括:
1. Firewire IEEE 1394 接口
2. USB 接口
3. GigE Vision 接口
4. 复合模拟视频
5. LVDS
离线处理的一个优点是单个主机可以同时用于相机和系统控制。但另一方面,由于相机视频数据的逐帧传输存在延时,故这种方法不适用于输送带上产品检测这类需要实时处理的应用。
带在线处理功能的相机
随着技术的发展,最新的DSP已具备强大的计算能力,足以实时执行复杂的算法,这使得在线处理成为可能。而相机就内置有无胶粘连接或带胶粘逻辑(glue logic)的传感器和DSP处理器。传感器的扫描视频通过DMA(直接存储器存取)的方式直接被传送到DSP的存储器,并逐帧处理。然后处理器直接对被控系统启动最终结果或控制功能,或者是作为一条命令传送给主机。
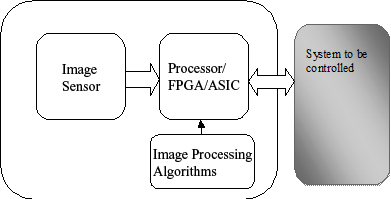
图3:带在线处理功能的相机
相机中视频处理的优势在于,可实时执行数据处理,Firewire、USB或GigE接口上没有数据包处理的开销。对于运行在300 MHz以上的时钟频率的DSP处理器,可采用字节优化的汇编代码来实现更快的实时处理。对检测类的应用(譬如输送带上高速移动的器件)而言,图像算法的实时处理至为关键。一个帧的成像需要一定的计算,并得在另一个图像帧传送到系统之前完成。
关键因素
对于机器视觉系统,图像质量是直接影响到最终图像处理结果的主要因素。尤其是在自然采光条件下,图像质量随光源条件改变而大幅变化。通过调节相机设置,如“放大倍数”和“曝光时间”,可以补偿外界照明的不稳定,改善图像质量。
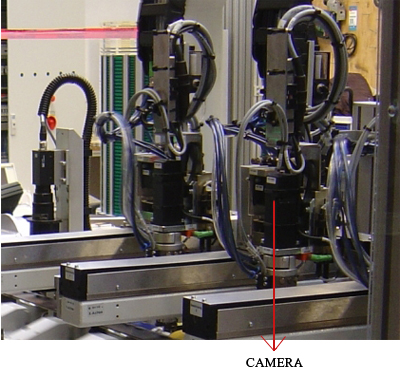
图4:用于检测的机器视觉相机。

图5:机器视觉引导检测系统。
{pagination}
根据终端应用的需求和传感器与被摄目标的接近程度,光源可以是单独的单元或者在镜头附近是摄像头的一部分。如果光源在摄像头附件,则相机可以和光源一起移动。常用光源有卤素灯泡、荧光灯和发光二极管(LED)。
影响图像质量的主要因素:
1. 光强度
2. 光方向
3. 物距
4. 焦距
5. 采样率
6. 曝光时间和放大倍数
7. 暗漏电流
8. 分辨率(像素数)
镜头选择和要求
镜头的质量与传感器质量一样重要。相机是一个光电系统,同时利用光学和电子学原理成像。一旦镜头选择不好就会造成图像模糊。
镜头尺寸和形状的选择主要在于焦距,但物距较小时,常采用C- mount镜头。若相机需要在反射强烈的环境中工作,最好选择带抗反射涂层的镜头。相机总体覆盖范围取决于所需视角、工作距离和镜头性能。
精度和目标物体的分辨率
镜头设计/选择的另一个关键参数是目标物体所需的分辨率(mm 或 mil (1/1000英寸))。当相机用于在生产中测量目标物体尺寸时,必需考虑到以下几个重要参数:
1. 视角
2. 传感器分辨率(像素数)
3. 图像质量
4. 视觉工具精度
例如,对于IBIS5-1300 传感器 (1.3M像素 1280(h) X 1024 (v)),1/10像素的工具精度,5英寸宽4英寸高的物体,6英寸的水平视角,精度为0.0004英寸。
分辨率:根据视角和被摄目标物体所需的图像粒度,常采用VGA 到兆像素(Megapixel)阵列。
灵敏度
单色或彩色:大多数检测应用都可以采用生成灰度级图像的单色传感器。典型应用有条形码读取器、指纹扫描仪、生产器件的尺寸测量等等。
当目标物体的颜色与生产控制质量有关联时,需采用彩色器件。胡椒粉或苹果的分类分级就是一个实例。传感器的24位色彩数据能够捕获到1740万种不同的色度。
传感器参数及选择
对于机器视觉应用,传感器和相机必需支持多个分辨率和帧速。若采用可编程技术来实现这种特性,可以获得一个适用于多种机器视觉应用的通用性更强的相机设计。
* 窗口和分辨率选择
* 用户可编程高帧速
* 标准电气CMOS接口
* 传感器暗漏电流低
可靠性和传感器性能必须能够支持各种工业工作环境。器件必须是工业级的,工作温度范围一般为0 - 80度。
应用:
* 引导:机器人取放装置中的系统
* 检测:材质、表面、标签、装配
* 测量:生产部件的物理尺寸,装配部件的尺寸
* 识别:取放装置、机器人、字符读取、编码读取
Cypress半导体公司提供参数用户可选的高帧速图像传感器,这些传感器同时还支持工业级温度范围,故非常适用于机器视觉相机设计。IBIS 和 LUPA传感器系列的帧速范围为30 fps 到 500 fps。
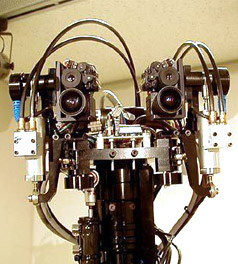
图6:配备了相机的机器人头部。这种结构采用了两个轴对齐的相机来达到立体视觉效果。
作者:Venkata Raghavan
产品应用经理
赛普拉斯半导体















